
ACKNOWLEDGMENTS
The American Association for Artificial Intelligence wishes to acknowledge and thank the following individuals for their generous contributions of time and energy to the successful creation and planning of the Twelfth National Conference on Artificial Intelligence and the Sixth Innovative Applications of Artificial Intelligence Conference.
AAAI-94
Conference Chair: William Swartout, USC/Information Sciences Institute
Program Cochairs: Barbara Hayes-Roth, Stanford University; Richard Korf, University of California, Los Angeles
Associate Chair: Howard E. Shrobe, Massachusetts Institute of Technology
Challenge Committee Chair: Thomas L. Dean, Brown University
Art Exhibition Chair: Joseph L. Bates, Carnegie Mellon University
Machine Translation Showcase Committee: Jaime Carbonell, Carnegie Mellon University, Bonnie
Dorr, University of Maryland, and Eduard Hovy, University of Southern California
Robot Competition and Exhibition Chair: Reid Simmons, Carnegie Mellon University
Robot Laboratory Chair: Willie Lim, Lehman Brothers
Student Abstract Program Chair: Kristian Hammond, University of Chicago
Tutorial Program Chair: Devika Subramanian, Cornell University
Tutorial Program Cochair: Philip Klahr, Inference Corporation
Video Program Cochairs: John E. Laird, University of Michigan and Elliot Soloway, University of
Michigan
Workshop Program Chair: Donald Perlis, University of Maryland
IAAI-94
Program Chair: Elizabeth A. Byrnes, Bankers Trust
Program Cochair: Jan Aikins, Trinzic Corporation
A complete listing of the AAAI-94 and IAAI-94 Program Committee members appears in the AAAI-94 and IAAI-94 Proceedings. Thanks to all!
1994 AAAI Fellows
Each year the American Association for Artificial Intelligence recognizes a small number of members who have made significant sustained contributions to the field of artificial intelligence, and who have attained unusual distinction in the profession. AAAI is pleased to announce the 17 newly elected Fellows for 1994:
Ranan B. Banerji, Saint Joseph’s University; Alan W. Biermann, Duke University; Thomas O. Binford, Stanford University; Thomas L. Dean, Brown University; Rina Dechter, University of California, Irvine; Daniel C. Dennett, Tufts University; Thomas Glen Dietterich, Oregon State University; John S. Gero, University of Sydney; Julia B. Hirschberg, AT&T Bell Laboratories; Jim Howe, University of Edinburgh; Philip Klahr, Inference Corporation; Richard E. Korf, University of California, Los Angeles; Kathleen R. McKeown, Columbia University; Jacques Pitrat, P. and M. Curie University; Zenon W. Pylyshyn, Rutgers University; Paul S. Rosenbloom, University of Southern California; Stuart C. Shapiro, State University of New York at Buffalo
Admission
Each conference attendee will receive a name badge upon registration. This badge is required for admittance to the technical, tutorial, exhibit, IAAI, AI-on-Line, and workshop programs. Tutorial attendees must also check in with the registration assistant at the entrance to each tutorial room. Smoking, drinking, and eating are not permitted in any of the technical, tutorial, IAAI or exhibit sessions.
AI-on-Line
Held in conjunction with IAAI-94, AI-on-Line will be held Monday, August 1 through Wednesday, August 3 in Hall 6A, Washington State Convention & Trade Center, and will focus on users’ issues. This series of panels and invited talks will be followed by interactive discussions. Please consult the program schedule for session times.
Art Exhibition
The AAAI-94 Art Exhibition will be held Tuesday, August 2 and Wednesday, August 3, from 10:00 AM – 6:00 PM, and Thursday, August 4, from 8:30 AM – 6:00 PM in Rooms 618-620 of the Washington State Convention & Trade Center. The Art Exhibition will focus on a few, carefully selected works, representing a variety of areas of artistic performance, including painting, drawing, animation, music, and real-time interactive environments. Each piece will demonstrate the use of concrete AI technologies, such as perception, learning, or agent architectures, in the service of artistic behavior.
GENERAL INFORMATION
Baggage Holding
There is no baggage holding area at the Washington State Convention & Trade Center. Therefore, we suggest that you check your luggage with the bellman at your hotel after you have checked out of your hotel. AAAI is not responsible for personal items left in the convention center.
Banking
The following banks are located within 2 to 5 blocks of the Washington State Convention & Trade Center and exchange of all major foreign currencies is available:
US Bank (206/344-3798)
1420 Fifth Avenue (3 blocks from WSCTC) Monday – Thursday, 9:00 AM – 4:00 PM; Friday, 9:00 AM – 6:00 PM
Washington Mutual (206/461-7020)
620 Pine (One block from WSCTC) Monday – Friday, 9:00 AM – 6:00 PM (Canadian exchange only)
SeaFirst Bank (206/358-0529)
408 Pike Street (4 blocks from WSCTC) Monday – Friday, 9:00 AM – 6:00 PM; Saturday, 9:00 AM – 1:00 PM
Career Information
A bulletin board for job opportunities in the artificial intelligence industry will be made available in the registration area on the fourth floor of the Washington State Convention & Trade Center. Attendees are welcome to post job descriptions of openings at their company or institution.
Child Care Services
Child care services are available from Panda, 2617 NW 59th, Suite 102, Seattle, Washington 98107, 206/325-2327. A child care provider will come to your hotel room at a minimum cost of $8.00 per hour, with a four hour minimum. The price will increase with the number of children in care. All child care providers are fully licensed. Advance reservations are recommended, but occasionally last minute cancellations arise.
Child care information is listed as a service to our attendees, and does not represent an endorsement of the above programs by AAAI.
Coffee Breaks
Coffee will be served in the Meeting Room Lobby and West Lobby on the sixth level of the WSCTC during AAAI–94, IAAI–94 and workshop session breaks, Sunday, July 31 – Thursday, August 4. Coffee breaks for the Tutorial Program will be held inside each tutorial meeting room at 10:30 AM and 3:30 PM.
Copy Services
Kinko’s, providing complete photocopy, fax, mail and computer services, is located on the lower level of the Washington State Convention & Trade Center. Kinko’s is open 24 hours, seven days a week.
Dining
A concession will be open in Hall 6E of the Washington State Convention & Trade Center during exhibit hours. There are also several concessions in the convention center, offering inexpensive fare, open 6:00 AM – 10:00 PM. In addition, the conference hotels each have restaurants. A selection of other Seattle restaurants is listed in materials found in registration packets.
Exhibit Entrance
Conference attendees must be wearing their conference registration or exhibitor badge to enter the Exhibition. Vendor issued guest passes must be redeemed at the Guest Pass desk in the registration area in the lobby of Hall 4B, Washington State Convention & Trade Center.
Exhibit Program
The exhibit program will be held Tuesday, August 2 and Wednesday, August 3, in Hall 6E of the Washington State Convention & Trade Center. Exhibitors include software manufacturers, publishers, consultants, universities and nonprofit organizations involved in artificial intelligence, who will be displaying and demonstrating their current products, services, or research. Please take a moment to visit the Applications Pavilion, located in the center of the exhibit floor, and featuring a series of graphic presentations of new products.
Exhibit Hours
Tuesday, August 2 10:00 AM – 6:00 PM
Wednesday, August 3 10:00 AM – 6:00 PM
Exhibitors
A complete list of exhibitors, booth locations, and outlines of products, services or research efforts of exhibiting organizations can be found in the back section of this program.
Handicapped Facilities
The Washington State Convention & Trade Center, Sheraton Seattle, Holiday Inn Crowne Plaza, and the Park Plaza Suites are equipped with handicapped facilities.
Press
All members of the media are requested to check in at the Press Room in Room 402 on the fourth
level of the Washington State Convention & Trade Center. Press badges will be issued only to individuals with approved credentials. Once approved, a badge can be issued in the registration area outside Hall 4B. The Press Room will be open during the following hours:
Sunday, July 31 1:00 PM – 5:00 PM
Monday, August 1 8:30 AM – 5:00 PM
Tuesday, August 2 8:30 AM – 5:00 PM
Wednesday, August 3 8:30 AM – 5:00 PM
Thursday, August 4 8:30 AM – 5:00 PM
An AAAI volunteer will be on duty during press room hours to assist the members of the press and media. The Press Room phone number is (206) 447-5065.
Printed Materials
Display tables for the distribution of promotional and informational materials of interest to conference attendees will be located in the registration area in the lobby of Hall 4B on the fourth floor of the Washington State Convention & Trade Center.
Proceedings
Each registrant for the AAAI-94 technical program and IAAI-94 will receive a ticket with the registration materials for one copy of the appropriate conference proceedings. The ticket may be redeemed at the AAAI Press/MIT Press Proceedings counter in the foyer of the technical session rooms on the sixth level of the Washington State Convention & Trade Center during registration hours, or at the MIT Press booth #100, located in Hall 6E, during exhibit hours. AAAI-94 Proceedings can also be redeemed by mailing the ticket with your name and address to: The MIT Press, 55 Hayward, Cambridge, MA 02142. IAAI-94 Proceedings are distributed by AAAI. Extra proceedings may be purchased at the onsite registration desk or at The MIT Press booth during exhibit hours. Thursday, August 4, will be the last day to purchase extra copies of the proceedings onsite.
Receptions
The AAAI-94 Opening Reception will be held Tuesday, August 2 from 7:00 – 9:00 PM at the Pacific Science Center, 200 Second Avenue North, Seattle, near the Space Needle. From the Convention Center or conference hotels, attendees should plan to walk to the monorail station (see “Transportation” for monorail information), or take a taxi to the PSC. The IAAI opening reception will be held Monday, August 1 in the Metropolitan Ballroom of the Sheraton Seattle Hotel.
Recording
No audio or video recording is allowed in the Tutorials or IAAI-94. Audiotapes of the plenary sessions, invited talks and panels will be for sale in the registration area in the lobby of Hall 4B on the fourth level of the Washington State Convention & Trade Center. A representative from First Tape Incorporated will be available to take your order during registration hours, beginning Tuesday, August 2. Order forms are included with registration materials. Tapes may also be ordered by mail from: First Tape Incorporated, 770 North LaSalle Street, Suite 301, Chicago, Illinois 60610.
Registration
Conference registration will take place in the lobby of Hall 4B on the fourth level of the Washington State Convention & Trade Center, beginning Sunday, July 31. Registration hours are:
Sunday, July 31 7:30 AM – 6:00 PM
Monday, August 1 7:30 AM – 6:00 PM
Tuesday, August 2 7:30 AM – 6:00 PM
Wednesday, August 3 7:30 AM – 6:00 PM
Thursday, August 4 8:00 AM – 5:00 PM
Checks drawn on US banks, VISA, Mastercard, American Express, government purchase orders, traveler’s checks, and US currency will be accepted. We cannot accept foreign currency or checks drawn on foreign banks.
Robot Building Laboratory
The Robot Building Laboratory will be held Sunday, July 31 through Thursday, August 4 in Hall 4C on the fourth level of the Washington State Convention & Trade Center, adjacent to the Robot Competition and Exhibition. Admittance is through Hall 4B. Participants have been preregistered, but attendees are invited to view their progress throughout the week during normal exhibit hours. Competitions will be held at 5:00 PM on Monday and Wednesday, and the final competition will be held at 2:00 PM on Thursday. The Robot Building Laboratory is sponsored by AAAI, and cosponsored by Microsoft Corporation. AAAI would like to thank Microsoft for its generous support of student participation in this event.
Robot Competition and Exhibition
The AAAI-94 Robot Competition and Exhibition will be held Sunday, July 31 through Tuesday, August 2 in Hall 4B of the Washington State Convention & Trade Center, and conference attendees are invited to check the robots’ progress from 10:00 AM to 6:00 PM each day. A final competition will be held on Tuesday, August 2, from 2:00 – 6:00 PM. A series of competitions, demonstrations, videos and exhibits will be featured. A complete listing of competition participants, abstracts, and team members is contained within this program, along with competition rules. The Robot Competition and Exhibition is sponsored by AAAI, and cosponsored by the NASA Artificial Intelligence Research Branch, RECOM Technologies, and Microsoft Corporation. AAAI would like to thank these contributors for their generous support of student participation in this event.
Speaker Ready Room
The Speaker Ready Room is located in Room 605 on the sixth level of the Washington State Convention & Trade Center. This room has audio-visual equipment to assist speakers with their preparations. All AAAI-94 and IAAI-94 speakers should use this room to organize their materials. The room will be open from 8:00 AM – 5:00 PM, Sunday, July 31 through Thursday, August 4. Invited Speakers are asked to come to Room 605 one day prior to their speech. Representatives from AV Headquarters will be available each day from 9:00 AM to 5:00 PM to confirm your audiovisual needs, and assist with the preparation of your materials if necessary.
Student Abstract and Poster Program
The Student Abstract and Poster Program will be held in Hall 6E on Tuesday and Wednesday, August 2 and 3, and in Rooms 616 and 617 on Thursday, August 4. Abstracts will be posted for viewing during exhibit hours on Tuesday and Wednesday, and from 8:30 AM – 5:00 PM on Thursday. Students will be available for questions during regularly scheduled times listed in this program and posted in the poster session rooms. Abstracts are also published in the AAAI- 94 Proceedings.
T-Shirt Sales
T-Shirts will be for sale during registration hours in the registration area in the lobby of Hall 4B on the fourth level of the Washington State Convention & Trade Center. Supplies are limited. Price: $10.00 each.
Telephones
Public telephones are located in all lobby areas throughout the Washington State Convention & Trade Center.
Transportation
Air Transportation and Car Rentals
The American Association for Artificial Intelligence has selected United Airlines as the official carrier and Hertz Rental Car as the official car rental agency for AAAI-94. If you need to change your airline or car rental reservations, please call the United Airlines Specialized Meeting Reservations Center directly at 800/521-4041 or contact any travel agent. Be sure to specify that you are a AAAI-94 attendee and provide our reference #545RS. For onsite travel needs, the Sheraton Seattle Hotel has airline ticket information available at the Concierge Desk in the hotel lobby.
Ground Transportation
The following information provided is the best available at press time. Please confirm fares when making reservations.
Airport Connections:
Gray Line of Seattle 206/624-5077
Seattle-Tacoma Airport to downtown Seattle Fare: $7; $12 round trip
Stita Taxi
206/246-999 From Seattle-Tacoma Airport to downtown Seattle Fare: Approximately $29
Bus
The Seattle Greyhound/Trailways terminal is located at Eighth and Stewart Streets, approximately five blocks from the Washington State Convention & Trade Center. For more information, call 800/231-2222.
Rail
Amtrak has 10 trains daily that link Seattle to Vancouver and major cities throughout the US. The Amtrak station is located at Third and Jackson Streets next to the Kingdome, approximately 12 blocks from the Washington State Convention & Trade Center (a taxi is recommended). For more information, call 800/872-7245.
Metro Transit
Metro operates bus service throughout Seattle and Kings County. Metro rides are free in the downtown Seattle area between the hours of 4:00 AM and 9:00 PM. For more information, call 206/553-3000.
Monorail
Monorail, one form of public transportation in Seattle, runs from Westlake Center in downtown Seattle to the Seattle Center, where the Space Needle, Pacific Science Center, Seattle Opera House, and numerous other attractions are located. The monorail runs from 9:00 AM to midnight daily, and the 90-second ride is 90 cents one way.
Tutorial Syllabi
Extra copies of AAAI-94 tutorial syllabi will b available for purchase in the registration area in the lobby of Hall 4B beginning Tuesday, August 2. Supplies are limited. Cost is $15.00 per syllabus.
Videotape Presentations
A formal videotape presentation has been added to the conference program this year. Videos depicting implemented systems resulting from AI research will be featured in the video program, which will run continuously in the Applications Pavilion in Hall 6E as well as room 615 on the sixth level of the Washington State Convention & Trade Center. Abstracts of accepted videos are included in the AAAI-94 Proceedings. Copies of the video program may be ordered from AAAI. The complete 1994 Video Program listing is contained in this program.
Visitor Information
A general information booth, located in the lobby of Hall 4B on the fourth level of the Washington State Convention & Trade Center, will be staffed by a Convention Center representative and open during registration hours.
Volunteer Room
Volunteer Headquarters, located in Room 403 on the fourth level of the Washington State Convention & Trade Center will be open from 8:00 AM – 5:00 PM, Saturday, July 30 through Thursday, August 4. All volunteers should plan to check in with the volunteer coordinator or his assistant prior to their shifts. The volunteer meeting will be held Saturday, July 30, at 5:00 PM in Room 607 on the sixth level of the Washington State Convention & Trade Center.
SPECIAL MEETING
AAAI Annual Business Meeting will be held Wednesday, August 3, from 12:15 – 12:45 PM in Room 608, Washington State Convention & Trade Center; open to all AAAI members.
AAAI Conference Committee Meeting will be held Thursday, August 4, from 7:30 – 8:30 AM in the Madrona Room, on the second level of the Sheraton Seattle.
AAAI Executive Council Meeting will be held Sunday, July 31, from 9:00 AM – 5:00 PM in the Aspen Room, Sheraton Seattle. Breakfast will be served at 8:30 AM.
AAAI Fellows Recognition Dinner will be held Wednesday, August 3, from 6:00 – 10:00 PM at the Sheraton Seattle. A reception will begin at 6:00 PM in the East Ballroom on the second level, followed by dinner at 7:00 PM in the Metropolitan Ballroom on the third level.
AAAI Press Editorial Board Meeting will meet Thursday, August 4 at 12:15 – 1:30 PM in the Madrona Room of the Sheraton Seattle.
AAAI Publications Committee Meeting will be held Tuesday, August 2, from 7:30 – 9:00 AM in Rooms 428 & 430 of the Sheraton Seattle.
AAAI-94 Program Committee Dinner will be held Monday, August 1, from 6:00 – 10:00 PM in the Cirrus Room on the 35th level of the Sheraton Seattle.
AI and the Law Subgroup Meeting will be held Tuesday, August 2, from 12:30 – 1:00 PM in Room 606, Washington State Convention & Trade Center.
AI in Manufacturing Subgroup Meeting will be held Tuesday, August 2, from 12:30 – 1:00 PM in Room 608, Washington State Convention & Trade Center.
AI in Medicine Subgroup Meeting will be held Tuesday, August 2, from 12:30 – 1:00 PM in Room 607, Washington State Convention & Trade Center.
AI Journal Editorial Board Meeting will be held Tuesday, August 2 from 12:15 – 1:30 PM in the Room 428 & 430 of the Sheraton Seattle.
IJCAII Trustees Meeting will be held Friday, August 5, from 9:00 AM – 5:00 PM in the Board Room of the Sheraton Seattle.
SIGART Annual Business Meeting will be held Thursday, August 4, from 12:15 – 1:00 PM in Room 608, Washington State Convention & Trade Center, and is open to all.
Invited Presentations
AAAI-94 Invited Presentations
❚ Keynote Address: The Excitement of AI, by Raj Reddy, Carnegie Mellon University. Introduction by Barbara Grosz, Harvard University Tuesday, August 2, 9:00–10:10 AM
❚ Joint AAAI/IAAI Invited Talk: Computing in the ‘90s: New Platforms, Products, and Partnerships, by Steve Ballmer, Microsoft Corporation. Introduction by Barbara Grosz, Harvard University Tuesday, August 2, 10:30 AM–12:10 PM
❚ In Search of Tractable Islands, by Rina Dechter, UC Irvine. Introduction by Judea Pearl, UC Los Angeles Tuesday, August 2, 1:30–2:20 PM
❚ Perspectives on Robot Learning, by Chris Atkeson, Georgia Institute of Technology. Introduction by Leslie Pack Kaelbling, Brown University Tuesday, August 2, 2:20–3:10 PM
❚ The Information Highway Will Not go Far Without Intelligent Information Infrastructure: Issues, Examples, and the Need for AI, by Kirstie Bellman, ARPA, SISTO. Introduction by Daniel Bobrow, Xerox PARC Tuesday, August 2, 3:30–5:10 PM
❚ AAAI Presidential Address: Collaborative Systems, by Barbara Grosz, Harvard University. Introduction by Pat Hayes, University of Illinois Wednesday, July 14, 9:10–10:10 AM
❚ The Synergy of AI, Art, and Interactive Entertainment, by Joseph Bates, Carnegie Mellon University. Introduction by Raj Reddy, Carnegie Mellon University Wednesday, August 3, 10:30 AM–12:10 PM
❚ Development of Knowledge-Based Systems from Reusable Components, by Mark Musen, Stanford University School of Medicine. Introduction by Bruce Buchanan, University of PittsBurgh Wednesday, August 3, 1:30–2:20 PM
❚ Learning and Intelligent Agents, by Leslie Pack Kaelbling, Brown University. Introduction by Stan Rosenschein, Teleos Wednesday, August 3, 2:20–3:10 PM
❚ Joint IAAI/AAAI Panel: Providing Solutions: The Next Generation of AI Products, Organized by Monte Zweben, Red Pepper Software Wednesday, August 3, 3:30–5:10 PM
❚ The Evolution of Emergent Computation, by Melanie Mitchell, Santa Fe Institute. Introduction by Oren Etzioni, University of Washington Thursday, August 4, 8:30–9:20 AM
❚ Can You Explain That Again? by Johanna Moore, University of Pittsburgh. Introduction by William Swartout, University of Southern California Thursday, August 4, 9:20–10:10 AM
❚ Using Neural Networks to Learn Intractable Generative Models, by Geoffrey E. Hinton, University of Toronto. Introduction by Eugene Charniak, Brown University Thursday, August 4, 10:30 AM–12:10 PM
❚ Robots Beyond the Lab and Factory, by Red Whittaker, Carnegie Mellon University. Introduction by Richard Korf, UCLA Thursday, August 4, 1:30–3:10 PM
❚ NASA’s Artificial Intelligence Program: The First Decade, by Melvin D. Montemerlo, NASA Headquarters. Introduction by Peter Friedland, NASA Ames Research Center Thursday, August 4, 3:30–5:10 PM
IAAI-94 Invited Presentations
❚ Automating the Distribution of Knowledge, by Avron Barr, Aldo Ventures, Inc. Monday, August 1, 10:50–11:50 AM
❚ AI-on-Line Panel: Gaining Support for AI Technologies within Your Organization. Organized by Ken Kleinberg, New Science Associates Monday, August 1, 2:00–3:30 PM
❚ Commercial Natural Language: Critical Success Factors, by Larry Harris, Linguistic Technology Wednesday, August 3, 10:20–11:30 AM
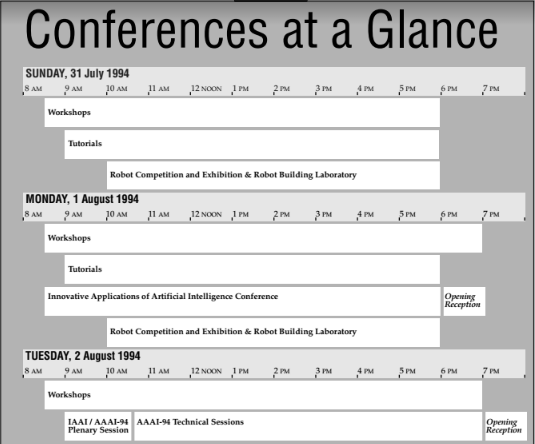
Sunday, July 31
7:30 AM – 6:00 PM Conference Registration Lobby of Hall 4B, Washington State Convention & Trade Center
10:00 AM – 6:00 PM Robot Building Laboratory (Observation only) Hall 4C (Entry through Hall 4B) Ongoing for participants
10:00 AM – 6:00 PM Robot Competition and Exhibition Hall 4B Special Meetings
8:30 AM – 5:00 PM AAAI Executive Council Meeting Aspen Room, Sheraton Seattle Workshops
8:30 AM – 6:00 PM AI, Artificial Life and Entertainment (W1), Organized by Hiroaki Kitano and Joseph Bates Room 618, Washington State Convention & Trade Center
8:30 AM – 6:00 PM AI & Systems Engineering (W2), Organized by Perry Alexander Room 619, Washington State Convention & Trade Center
8:30 AM – 6:00 PM AI in Agriculture and Natural Resource Development (W3), Organized by Richard Olson Room 617, Washington State Convention & Trade Center
8:30 AM – 6:00 PM AI Technologies in Environmental Applications (W6), Organized by Cindy Mason East Ballroom A, Sheraton Hotel
8:30 AM – 6:00 PM Comparative Analysis of Planning Systems (W8), Organized by David Wilkins Room 620, Washington State Convention & Trade Center
8:30 AM – 6:00 PM Computational Dialectics (W9), Organized by Ron P. Loui East Ballroom B, Sheraton Hotel
8:30 AM – 6:00 PM Experimental Evaluation of Reasoning and Search Methods (W10), Organized by James Crawford Room 615, Washington State Convention & Trade Center
8:30 AM – 6:00 PM Integration of Natural Language and Speech Processing (W12), Organized by Paul McKevitt Room 602, Washington State Convention & Trade Center
8:30 AM – 6:00 PM Knowledge Discovery in Databases (W14), Organized by Usama Fayyad and Ramasamy Uthurusamy
Room 603-604, Washington State Convention & Trade Center
8:30 AM – 6:00 PM Spatial and Temporal Reasoning (W19), Organized by Frank Anger Room 616, Washington State Convention & Trade Center
Tutorials
9:00 AM – 1:00 PM Morning Tutorials
9:00 AM – 1:00 PM SA1: Conceptual Foundations of Case-Based Reasoning, Janet L. Kolodner Room 606, Washington State Convention & Trade Center
9:00 AM –1:00 PM SA2: Building Expert Systems in the Real World: How to Plan, Organize, Design, Develop, Engineer, Integrate and Manage for Expert Systems Success, Tod Hayes Loofbourrow and Ed *Mahler Room 607, Washington State Convention & Trade Center
9:00 AM –1:00 PM SA3: Learning from Examples: Recent Topics in Symbolic and Connectionist Learning, Haym Hirsh and Jude Shavlik Room 608, Washington State Convention & Trade Center
9:00 AM –1:00 PM SA4: Intelligent Multimedia Interfaces, Mark T. Maybury and Eduard Hovy Room 609, Washington State Convention & Trade Center
9:00 AM –1:00 PM SA5: Knowledge Based Scheduling, Monte Zweben and Mark Fox Room 611-612, Washington State Convention & Trade Center
Monday Morning
1:00 – 2:00 PM Tutorial Lunch Break
2:00 – 6:00 PM Afternoon Tutorials
2:00 – 6:00 PM SP1: Multi-Agent Systems and Distributed Artificial Intelligence, Jeff Rosenschein and Les Gasser Room 606, Washington State Convention & Trade Center
2:00 – 6:00 PM SP2: Knowledge Acquisition for Knowledge-Based Expert Systems, Bruce Buchanan and David Wilkins Room 607, Washington State Convention & Trade Center
2:00 – 6:00 PM SP3: Applied Machine Learning, Jeffrey C. Schlimmer Room 608, Washington State Convention & Trade Center
2:00 – 6:00 PM SP4: Business Process Re-engineering: Using AI to Change the Organization, Robert A. Friedenberg and Neal M.Goldsmith Room 609, Washington State Convention & Trade Center
2:00 – 6:00 PM SP5: AI in Customer Service and Support, Including Help Desks, Avron Barr and Anil Rewari Room 611-612, Washington State Convention & Trade Center
Monday Morning, August 1
7:30 AM – 6:00 PM Conference Registration Lobby of Hall 4B, Washington State Convention & Trade Center
10:00 AM – 6:00 PM Robot Building Laboratory (Observation only) Participant hours are continuous throughout the week. Hall 4C (Entry through Hall 4B)
10:00 AM – 6:00 PM Robot Competition and Exhibition Hall 4B
Workshops
8:30 AM – 6:00 PM AI in Agriculture and Natural Resource Development (W3), Organized by Richard Olson Room 617, Washington State Convention & Trade Center
8:30 AM – 6:00 PM AI in Business (W4), Organized by Daniel O’Leary East Ballroom B, Sheraton Hotel
8:30 AM – 6:00 PM AI Technologies in Environmental Applications (W6), Organized by Cindy Mason East Ballroom A, Sheraton Hotel
9:00 AM – 6:00 PM Case-Based Reasoning (W7), Organized by David Aha Room 603, Washington State Convention & Trade Center
8:30 AM – 7:00 PM Indexing and Reuse in Multimedia Systems (W11), Organized by Catherine Baudin Room 616, Washington State Convention & Trade Center
8:30 AM – 6:00 PM Integration of Natural Language and Speech Processing (W12), Organized by Paul McKevitt Room 602, Washington State Convention & Trade Center
8:30 AM – 12:30 PM Knowledge Discovery in Databases (W14), Organized by Usama Fayyad and Ramasamy Uthurusamy Room 604, Washington State Convention & Trade Center
8:30 AM – 6:00 PM Planning for Interagent Communication (W16), Organized by Dan Suthers Room 613, Washington State Convention & Trade Center
Tutorials
9:00 AM – 1:00 PM Morning Tutorials
9:00 AM to 1:00 PM MA1: Computational Challenges from Molecular Biology, Peter Karp and Russ Altman Room 606, Washington State Convention & Trade Center
9:00 AM – 1:00 PM MA2: Constraint Satisfaction: Theory and Practice, Eugene C. Freuder and Pascal Van Hentenryck Room 607, Washington State Convention & Trade Center
9:00 AM – 1:00 PM MA3: Reinforcement Learning, Leslie Pack Kaelbling, Michael L. Littman, and Andrew W. Moore Room 608, Washington State Convention & Trade Center
9:00 AM – 1:00 PM MA4: Modeling Physical Systems: The State of the Art and Beyond, P. Pandurang Nayak and Peter Struss Room 609, Washington State Convention & Trade Center
9:00 AM – 1:00 PM MA5: Learning from Data: A Probabilistic Framework, Wray Buntine and Padhraic Smyth Room 611-612, Washington State Convention & Trade Center
Innovative Applications of Artificial Intelligence Conference (IAAI–94)
Hall 6A, Washington State Convention & Trade Center
8:30 – 9:00 AM IAAI Opening Remarks, by Elizabeth Byrnes, IAAI Conference Chair
9:00 – 9:30 AM ALEXIS: An Intelligent Layout Tool for Publishing, by Hong-Gian Chew and Moung Liang, Information Technology Institute; Philip Koh, Daniel Ong and JenHoon Tan, Singapore Press Holdings
9:30 – 10:00 AM Clavier: Applying Case-Based Reasoning to Composite Part Fabrication, by David Hinkle and Christopher N. Toomey, Lockheed AI Center
10:00 – 10:20 AM IAAI-94 Session Break
10:20 – 10:50 AM Countrywide Loan Underwriting Expert System, by Houman Talebzadeh, Sanda Mandutianu and Christian F. Winner, Countrywide Funding Corporation
10:50 – 11:50 AM Invited Talk: Automating the Distribution of Knowledge, by Avron Barr, Aldo Ventures, Inc. :
During the past few years, call centers responsible for customer service and help desk support have become focal points for top-level executive attention in several industries. Consequently, these departments have had funds available to invest in support automation systems. The result has been rapid evolution of technology in this area, including several AI technologies, as well as a changing perception of the support activity itself. The support center can be viewed as a corporate conduit for effectively delivering the needed elements of vast information repositories to workers who are too busy to “browse” a passive information resource. In this “corporate communications” role, help desks are early precursors of the data superhighway. Modern, AI-enhanced support automation systems offer “active” information retrieval, where a user who may not even know how to phrase a query is quickly guided by the system to exactly the information he or she needs. AI technologies are evolving to meet the demands of the service and support market, where convenient sharing of experience and rapid response to wide ranging situations are essential. In the process, our technologies are maturing from problem-solving curiosities into key enablers of the new, digital communications medium.
11:50 AM – 12:20 PM Meet the Authors
12:20 – 2:00 PM IAAI-94 Lunch Break
Monday Afternoon, August 1
Tutorials
2:00 – 6:00 PM Afternoon Tutorials
2:00 – 6:00 PM MP1: Genetic Algorithms and Evolutionary Computation, David E Goldberg and John R. Koza Room 606, Washington State Convention & Trade Center
2:00 – 6:00 PM MP2: Machine Learning: Combining Current Data with Prior Knowledge, Tom Mitchell Room 607, Washington State Convention & Trade Center
2:00 – 6:00 PM MP3: Real-Time Intelligent Planning and Control, James Hendler, Austin Tate, and David Musliner Room 608, Washington State Convention & Trade Center
2:00 – 6:00 PM MP4: Knowledge Sharing Technology, Michael Genesereth and Jeffrey D. Ullman Room 609, Washington State Convention & Trade Center
2:00 – 6:00 PM MP5: Inductive Logic Programming, Francesco Bergadano and Stan Matwin Room 611-612, Washington State Convention & Trade Center
Innovative Applications of Artificial Intelligence Conference (IAAI–94)
Hall 6A, Washington State Convention & Trade Center
2:00 – 3:30 PM AI-on-Line Panel: Gaining Support for AI Technologies within Your Organization, Organized by Kenneth A. Kleinberg, Applied Intelligent Systems
Panelists: Steve Kleinman, Amoco; Barry Glasgow, Metropolitan Life Insurance; Pranab Baruah, Boeing Computer Services; Lynne Halpin, Xerox
Since the early days of AI, forward thinking individuals and groups have been waging a continual battle to convince their organizations of the value of applying intelligent technologies. The most successful of these proponents have been the ones that have focused on solving business problems with these technologies, as opposed to focusing on research for research’s sake. The results of their efforts can be seen in the thousands of deployed intelligent solutions that span all major industries and that save companies millions of dollars each year, as well as provide companies with the strategic applications that are helping them to compete in an ever-more competitive and complex global environment. However, even with all this experience and all these successes, gaining support for these efforts is still often a major effort. To succeed today, advanced technology proponents need to appreciate that understanding how to transfer technology and gain support from business units and upper management is often as crucial an issue as understanding the technologies themselves. Successful strategies include dealing with education, training, culture, financial return and management structure. This panel will bring together an experienced group of advanced technology planners and developers to focus on such technology transfer issues as overcoming management resistance, initiating education and training programs, setting proper expectations, bringing groups within an organization together for common purpose, and creating organizational structures that will ensure continued success
3:30 – 3:50 PM IAAI-94 Session Break
3:50 – 4:20 PM Automating Human Service Practice Expertise. ASAP: The Automated Screening and Assessment Package, by Susan Millea, University of Texas at Austin and Mary Anne Mendall, Mendall Associates
4:20 – 4:50 PM CCPS: Transforming Claims Processing Using STATUTE Corporate for Microsoft Windows, by Belinda Burgess, Frank Cremen, Peter Johnson and David Mead, SoftLaw Corporation Pty Ltd
4:50 – 5:20 PM The Employee/Contractor Determiner, by Cheryl Wagner and Gary Morris, Internal Revenue Service Artificial Intelligence Laboratory
5:20 – 5:50 PM Meet the Authors
6:00 – 7:00 PM IAAI-94 Opening Reception
Metropolitan Ballroom, Sheraton Seattle Hotel
6:00 – 10:00 PM AAAI-94 Program Committee Dinner Cirrus Room, Sheraton Seattle Hotel
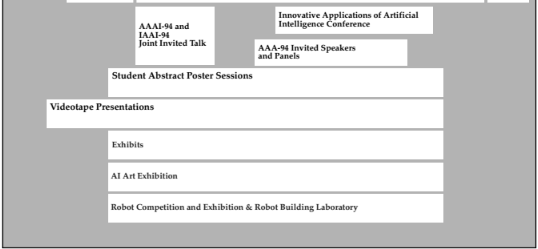
Tuesday Morning
Tuesday Morning, August 2
7:30 AM – 6:00 PM Conference Registration Lobby of Hall 4B, Washington State Convention & Trade Center
10:00 AM – 6:00 PM AI Art Exhibition Room 618-620, Washington State Convention & Trade Center
10:00 AM – 6:00 PM Exhibits Hall 6E, Washington State Convention & Trade Center
10:00 AM – 6:00 PM Robot Building Laboratory (Observation only) Participant hours are continuous throughout the week.
Hall 4C (Entry through Hall 4B), Washington State Convention & Trade Center
10:00 AM – 6:00 PM Robot Competition and Exhibition
2:00 – 6:00 PM Robot Competition and Exhibition Final Competition Hall 4B, Washington State Convention & Trade Center
10:00 AM – 6:00 PM Student Abstract Poster Sessions Hall 6E, Washington State Convention & Trade Center
8:30 AM – 6:00 PM Videotape Presentations Room 615, Washington State Convention & Trade Center
Special Meetings
7:30 – 9:00 AM AAAI Publications Committee Meeting Room 428 & 430, Sheraton Seattle Workshops
9:00 AM – 6:00 PM Case-Based Reasoning (W7), Organized by David Aha Room 603, Washington State Convention & Trade Center
8:30 AM – 6:00 PM Integration of Natural Language and Vision Processing (W13), Organized by Paul McKevitt Room 602, Washington State Convention & Trade Center
8:30 – 10:00 AM Planning for Interagent Communication (W16), Organized by Dan Suthers Room 613, Washington State Convention & Trade Center
National Conference on Artificial Intelligence (AAAI–94)
Plenary Session
9:00 – 10:10 AM Keynote Address: The Excitement of AI, by Raj Reddy, Carnegie Mellon University; Introduction by Barbara Grosz, Harvard University Hall 6BC, Washington State Convention & Trade Center
In spite of dire predictions, AI appears to be alive and thriving. The theme of Professor Reddy’s talk is, now that the hype is gone, those of us who are serious about AI should go about our long term ambitions without distractions. There are many exciting possibilities on the horizon. Over the next decade, we can reasonably expect to see the AI research of the last 30 years resulting in a car that can avoid accidents, a reading coach that can help children (and adults) overcome illiteracy, and a multimedia digital library that can provide access to information on demand. Research currently underway in intelligent interfaces should make computers easier to use by every man, woman, and child. Program understanding research should relieve the software nightmare by making programs easier to read, maintain and re-engineer. However, our long term goal must continue to be the creation of artifacts that learn from experience, exhibit adaptive goal oriented behavior, use vast amounts of knowledge, tolerate error and ambiguity in communication, interact with humans using language and speech, and respond in human time frame, i.e., in real time for obvious answers and little longer for database searches.
10:10 – 10:30 AM AAAI/IAAI Break
10:30 AM – 12:10 PM AAAI-94/IAAI-94 Joint Invited Talk: Computing in the ‘90s: New Platforms, Products, and Partnerships, by Steven Ballmer, Microsoft Corporation. Introduction by Barbara Grosz, Harvard University Hall 6BC, Washington State Convention & Trade Center As Executive Vice President of Sales and Support, Steve Ballmer is responsible for Microsoft sales, support, and marketing activities. Having joined Microsoft in 1980, he has seen tremendous changes in the personal computing arena. Steve will call upon his extensive industry experience to speak on “Computing in the ‘90s: New Platforms, Products, and Partnerships”. Looking beyond the 90’s, he will also discuss the coming technological challenges and suggest ways in which artificial intelligence will address those challenges.
10:30 AM – 12:10 PM Session 1: Distributed AI: Collaboration Room 606, Washington State Convention & Trade Center Session Chair: Ed Durfee
10:30 – 10:50 AM A Collaborative Parametric Design Agent, by Daniel Kuokka and Brian Livezey, Lockheed Palo Alto Research Laboratories
10:50 – 11:10 AM A Computational Market Model for Distributed Configuration Design, by Michael P. Wellman, University of Michigan
11:10 – 11:30 AM Exploiting Meta-Level Information in a Distributed Scheduling System, by Daniel E. Neiman, David W. Hildum, Victor R. Lesser and Tuomas W. Sandholm, University of Massachusetts
11:30 – 11:50 AM Divide and Conquer in Multi-agent Planning, by Eithan Ephrati, University of Pittsburgh and Jeffrey S. Rosenschein, Hebrew University
11:50 AM – 12:10 PM Progressive Negotiation for Resolving Conflicts among Distributed Heterogeneous Cooperating Agents, by Taha Khedro and Michael R. Genesereth, Stanford University
10:30 AM – 12:10 PM Session 2: Model-Based Reasoning
Room 607, Washington State Convention & Trade Center Session Chair: Alon Levy
10:30 – 10:50 AM Reasoning with Models, by Roni Khardon and Dan Roth, Harvard University
10:50 – 11:10 AM An Operational Semantics for Knowledge Bases, by Ronald Fagin and Joseph Y. Halpern, IBM Almaden Research Center; Yoram Moses, The Weizmann Institute of Science; Moshe Y. Vardi, Rice University
11:10 – 11:30 AM How Things Appear to Work: Predicting Behaviors from Device Diagrams, by N. Hari Narayanan, Masaki Suwa and Hiroshi Motoda, Hitachi Ltd.
11:30 – 11:50 AM Representing Multiple Theories, by P. Pandurang Nayak, Recom Technologies, NASA Ames Research Center
11:50 AM – 12:10 PM Prediction Sharing Across Time and Contexts, by Oskar Dressler and Hartmut Freitag, Siemens AG
10:30 AM – 12:10 PM Session 3: Advances in Backtracking Room 608, Washington State Convention & Trade Center Session Chair: Peter van Beek
10:30 – 10:50 AM Solution Reuse in Dynamic Constraint Satisfaction Problems, by Gérard Verfaillie and Thomas Schiex, ONERA-CERT
10:50 – 11:10 AM The Hazards of Fancy Backtracking, by Andrew B. Baker, University of Oregon
11:10 – 11:30 AM In Search of the Best Constraint Satisfaction Search, by Daniel Frost and Rina Dechter, University of California, Irvine
11:30 – 11:50 AM Dead-End Driven Learning, by Daniel Frost and Rina Dechter, University of California, Irvine
11:50 AM – 12:10 PM Weak-Commitment Search for Solving Constraint Satisfaction Problems, by Makoto Yokoo, NTT Communication Science Laboratories
10:30 AM – 12:10 PM Session 4: Cognitive Modeling Room 609, Washington State Convention & Trade Center Session Chair: B. Chandrasekaran
10:30 – 10:50 AM The Capacity of Convergence-Zone Episodic Memory, by Mark Moll, University of Twente; Risto Miikkulainen, University of Texas at Austin; Jonathan Abbey, Applied Research Laboratories
10:50 – 11:10 AM A Model of Creative Understanding, by Kenneth Moorman and Ashwin Ram, Georgia Institute of Technology
11:10 – 11:30 AM Experimentally Evaluating Communicative Strategies: The Effect of the Task by Marilyn A. Walker, Mitsubishi Electric Research Laboratories
11:30 – 11:50 AM A Reading Agent, by Tamitha Carpenter and Richard Alterman, Brandeis University
11:50 AM – 12:10 PM Ordering Relations in Human and Machine Planning, by Lee Spector, Mary Jo Rattermann, and Kristen Prentice, Hampshire College
10:30 AM – 11:50 PM Session 5: Lexical Acquisition / Syntax Room 611/612, Washington State Convention & Trade Center Session Chair: Diane Litman
10:30 – 11:30 Lexical Acquisition
10:30 – 10:50 AM Lexical Acquisition in the Presence of Noise and Homonymy, by Jeffrey Mark Siskind, University of Toronto
10:50 – 11:10 AM The Ups and Downs of Lexical Acquisition, by Peter M. Hastings, University of Michigan and Steven L. Lytinen, DePaul University
11:10 – 11:50 AM Syntax
11:10 – 11:30 AM L* Parsing: A General Framework for Syntactic Analysis of Natural Language, by Eric K. Jones and Linton M. Miller, Victoria University of Wellington
11:30 – 11:50 AM Principled Multilingual Grammars for Large Corpora, by Sharon Flank and Paul Krause, Systems Research and Applications Corporation; Carol Van Ess-Dykema, Department of Defense
12:10 AM – 1:30 PM AAAI/IAAI-94 Lunch Break
Tuesday Afternoon
Tuesday Afternoon, August 2
Special Meetings
12:30 – 1:30 PM AI and the Law Subgroup Meeting Room 606, Washington State Convention & Trade Center
12:15 – 1:30 PM AI Journal Editorial Board Meeting Room 428 & 430, Sheraton Seattle National Conference on Artificial Intelligence (AAAI–94)
1:30 – 3:10 PM AAAI-94 Invited Talks Hall 6BC, Washington State Convention & Trade Center
1:30 – 2:20 PM In Search of Tractable Islands, by Rina Dechter, University of California, Irvine. Introduction by Judea Pearl, University of California, Los Angeles
In explaining how people manage to handle theoretically intractable tasks, it is natural to assume that approximation methods, based on tractable models of reality, cover a significant portion of intelligent activity. I will present research that follows this paradigm, and aims at the construction of intelligent systems through the exploitation and synthesis of tractable sublanguages for automated reasoning.
One language whose tractable subclasses have been studied extensively over the last decade is Constraint Networks—a declarative language for specifying constraints among multi-valued objects (or variables) without specifying the procedures via which these constraints are satisfied. In some cases tractability emanates from the topological features of the problems, in others from the nature of the constraints themselves. I will present a unifying scheme that characterizes both topologically induced and constraint-induced tractability. I will then show how properties of tractable problems facilitate reasoning in intractable cases. Applications to diagnostic reasoning, default logic, and temporal reasoning will be outlined.
2:20 – 3:10 PM Perspectives on Robot Learning, by Chris Atkeson, Georgia Institute of Technology. Introduction by Leslie Pack Kaelbling, Brown University
This talk explores how robots can improve their performance with experience by remembering and reasoning about specific previous experiences. Memory-based learning is a memory intensive, numerical/statistical technique for learning functions. One important function to learn is the relationship between robot actions and behavioral outcomes. I will show videotape illustrating how memory-based learning techniques have been used to improve the execution of fixed robot plans by learning such functions. A major challenge that remains, however, is to extend these learning techniques so that they can help generate improved robot plans and policies, rather than simply perfect the execution of a human-generated plan. In this talk, I will present several examples of how memory- based learning can be used for generating and improving robot plans: memory-based learning can be used with a form of asynchronous dynamic programming in discrete systems to update a global policy in a prioritized manner, it can be used to locally refine or optimize a plan for continuous systems, and finally it can be used in continuous systems to limit exploration while globally optimizing plans, using techniques from function approximation and computational geometry.
1:30 – 3:10 PM Session 6: Task Network Planning / Planning Under Uncertainty Room 606, Washington State Convention & Trade Center Session Chair: Mark Drummond
1:30 – 2:30 PM Task Network Planning
1:30 – 1:50 PM The Use of Condition Types to Restrict Search in an AI Planner, by Austin Tate, Brian Drabble and Jeff Dalton, University of Edinburgh
1:50 – 2:10 PM Task-Decomposition via Plan Parsing, by Anthony Barrett and Daniel S. Weld, University of Washington
2:10 – 2:30 PM HTN Planning: Complexity and Expressivity, by Kutluhan Erol, James Hendler and Dana S. Nau, University of Maryland
2:30 – 3:10 PM Planning Under Uncertainty
2:30 – 2:50 PM An Algorithm for Probabilistic Least-Commitment Planning, by Nicholas Kushmerick, Steve Hanks and Daniel Weld, University of Washington
2:50 – 3:10 PM Control Strategies for a Stochastic Planner, by Jonathan Tash and Stuart Russell, University of California, Berkeley
1:30 – 3:10 PM Session 7: Genetic Algorithms and Simulated Annealing Room 607, Washington State Convention & Trade Center Session Chair: Tad Hogg
1:30 – 1:50 PM Genetic Programming and AI Planning Systems, by Lee Spector, Hampshire College
1:50 – 2:10 PM Exploiting Problem Structure in Genetic Algorithms, by Scott H. Clearwater and Tad Hogg, Xerox Palo Alto Research Center
2:10 – 2:30 PM Improving Search through Diversity, by Peter Shell, Carnegie Mellon University; Juan Antonio Hernandez Rubio and Gonzalo Quiroga Barro, Union Fenosa
2:30 – 2:50 PM Hierarchical Chunking in Classifier Systems, by Gerhard Weiss, Technische Universität München
2:50 – 3:10 PM Increasing the Efficiency of Simulated Annealing Search by Learning to Recognize (Un)promising Runs, by Yoichiro Nakakuki, NEC Corporation; and Norman Sadeh, Carnegie Mellon University
1:30 – 3:10 PM Session 8: Automated Reasoning I Room 608, Washington State Convention & Trade Center Session Chair: Wayne Snyder
1:30 – 1:50 PM Avoiding Tests for Subsumption, by Anavai Ramesh and Neil V. Murray, State University of New York at Albany
1:50 – 2:10 PM ModGen: Theorem Proving by Model Generation, by Sun Kim and Hantao Zhang, University of Iowa
2:10 – 2:30 PM Using Hundreds of Workstations to Solve First-Order Logic Problems, by Alberto Maria Segre and David B. Sturgill, Cornell University
2:30 – 2:50 PM Recovering Software Specifications with Inductive Logic Programming, by William W. Cohen, AT&T Bell Laboratories
2:50 – 3:10 PM Termination Analysis of OPS5 Expert Systems, by Hsiu-yen Tsai and Albert Mo Kim Cheng, University of Houston
1:30 – 3:10 PM Session 9: Decision-Tree Learning Room 609, Washington State Convention & Trade Center Session Chair: Tom Dietterich
1:30 – 1:50 PM Decision Tree Pruning: Biased or Optimal? by Sholom M. Weiss, Rutgers University and Nitin Indurkhya, University of Sydney
1:50 – 2:10 PM Learning Decision Lists Using Homogeneous Rules, by Richard Segal and Oren Etzioni, University of Washington
2:10 – 2:30 PM Induction of Multivariate Regression Trees for Design Optimization, by B. Forouraghi, L. W. Schmerr and G. M. Prabhu, Iowa State University
2:30 – 2:50 PM Bottom-Up Induction of Oblivious Read-Once Decision Graphs: Strengths and Limitations, by Ron Kohavi, Stanford University
2:50 – 3:10 PM Branching on Attribute Values in Decision Tree Generation, by Usama M. Fayyad, JPL/California Institute of Technology
3:10 – 3:30 PM AAAI-94 Session Break
3:30 – 5:10 PM AAAI-94 Invited Talk: The Information Highway Will Not Go Far without Intelligent Information Infrastructure: Issues, Examples, and the Need for AI, by Kirstie Bellman, ARPA/SISTO. Introduction by Daniel Bobrow, Xerox Palo Alto Research Center Hall 6BC, Washington State Convention & Trade Center
Artificial intelligence (AI) was conceived by its founders as the task of making machines that could be at least as intelligent as people. Many AI projects have introduced new concepts and relationships among humans and machines; some of these have enhanced, supplemented and even competed successfully with human performance. This talk focuses on a less glamorous, perhaps, but crucial need for artificial intelligence for the infrastructure underlying very large information systems. Unlike classical AI problems that developed as stand-alone systems that supplemented or replaced the individual, these problems require support for a variety of users interacting with systems that are embedded, collaborative, distributed, and heterogenous. This talk starts with a brief overview of earlier work in creating “intelligent user support functions” that help a user (machine or human) select, integrate, adapt, and explain the resources used in a very large system. Then we will discuss several current Advanced Research Projects Agency projects that are helping us determine the requirements for information infrastructure and that are sharpening up our understanding of what we mean by “middleware”. The talk concludes with some opinions on what AI, CS, and new mathematics is needed to go forward.
3:30 – 5:10 PM Session 10: Instructional Environments Room 611/612, Washington State Convention & Trade Center Session Chair: Hans Brunner
3:30 – 3:50 PM An Instructional Environment for Practicing Argumentation Skills, by Vincent Aleven and Kevin D. Ashley, University of Pittsburgh
3:50 – 4:10 PM Learning from Highly Flexible Tutorial Instruction, by Scott B. Huffman and John E. Laird, University of Michigan
4:10 – 4:30 PM Tailoring Retrieval to Support Case-Based Teaching, by Robin Burke, University of Chicago and Alex Kass, Northwestern University
4:30 – 4:50 PM Case-Based Retrieval Interface Adapted to Customer-Initiated Dialogues in Help Desk Operations, by Hideo Shimazu, Akihiro Shibata and Katsumi Nihei, NEC Corporation
4:50 – 5:10 PM Situated Plan Attribution for Intelligent Tutoring, by Randall W. Hill, Jr., Jet Propulsion Laboratory/Caltech and W. Lewis Johnson, USC/Information Sciences Institute
3:30 – 4:50 PM Session 11: Two-Player Games Room 606, Washington State Convention & Trade Center Session Chair: David Wilkins
3:30 – 3:50 PM Best-First Minimax Search: Othello Results, by Richard E. Korf and David Maxwell Chickering, University of California, Los Angeles
3:50 – 4:10 PM Evolving Neural Networks to Focus Minimax Search, by David E. Moriarty and Risto Miikkulainen, University of Texas at Austin
4:10 – 4:30 PM An Analysis of Forward Pruning, by Stephen J. J. Smith and Dana S. Nau, University of Maryland
4:30 – 4:50 PM A Strategic Metagame Player for General Chess-Like Games, by Barney Pell, NASA Ames Research Center
3:30 – 4:50 PM Session 12: Knowledge Acquisition, Capture, and Integration Room 607, Washington State Convention & Trade Center Session Chair: Rich Keller
3:30 – 3:50 PM Knowledge Refinement in a Reflective Architecture, by Yolanda Gil, USC/Information Sciences Institute
3:50 – 4:10 PM A User Interface for Knowledge Acquisition from Video, by Henry Lieberman, Massachusetts Institute of Technology
4:10 – 4:30 PM Building Non-Brittle Knowledge-Acquisition Tools, by Jay T. Runkel and William P. Birmingham, University of Michigan
4:30 – 4:50 PM The Acquisition, Analysis and Evaluation of Imprecise Requirements for Knowledge-Based Systems, by John Yen, Xiaoqing Liu and Swee Hor Teh, Texas A & M University
3:30 – 5:10 PM Session 13: Non-Monotonic Reasoning Room 608, Washington State Convention & Trade Center Area Chair: Craig Boutilier
3:30 – 3:50 PM Reasoning About Priorities in Default Logic, by Gerhard Brewka, GMD
3:50 – 4:10 PM A Knowledge Representation Framework Based on Autoepistemic Logic of Minimal Beliefs, by Teodor C. Przymusinski, University of California, Riverside
4:10 – 4:30 PM Soundness and Completeness of a Logic Programming Approach to Default Logic, by Grigoris Antoniou and Elmar Langetepe, University of Osnabrueck
4:30 – 4:50 PM Is Intractability of Non-Monotonic Reasoning a Real Drawback? by Marco Cadoli, Francesco M. Donini and Marco Schaerf, Università di Roma
4:50 – 5:10 PM A Preference-Based Approach to Default Reasoning, by James P. Delgrande, Simon Fraser University
Innovative Applications of Artificial Intelligence Conference (IAAI–94) Hall 6A, Washington State Convention & Trade Center
2:00 – 2:30 PM Expert Investigation and Recovery of Telecommunication Charges, by Hieu Le, Pacific Bell; Gary Vrooman, Philip Klahr, David Coles and Michael Stoler, Inference Corporation
2:30 – 3:00 PM Embedded AI for Sales-Service Negotiation, by Mike Carr, Chris Costello, Karen McDonald and Debbie Cherubino, Bell Atlantic Corporation; Pamela Trusal Kemper, Inference Corporation
3:00 – 3:30 PM Integrated Problem Resolution for Business Communications, by Carol Hislop, AT&T GBCS and David Pracht, Inference Corporation
3:30 – 3:50 PM IAAI-94 Session Break
3:50 – 4:20 PM An Assistant for Re-Engineering Legacy Systems, by Zheng-Yang Liu, Mike Ballantyne and Lee Seward, EDS
4:20 – 4:50 PM Routine Design for Mechanical Engineering, by Axel Brinkop and Norbert Laudwein, Fraunhofer Institute for Information and Data Processing; Rudiger Maassen, EKATO Ruhr und Mischtechnik
4:50 – 5:20 PM Model Based Test Generation for Processor Verification, by Yossi Lichtenstein, Yossi Malka and Aharon Aharon, IBM Israel Science and Technology
5:20 – 5:50 PM Meet the Authors
7:00 – 9:00 PM AAAI-94 Opening Reception Pacific Science Center, 200 Second Avenue North
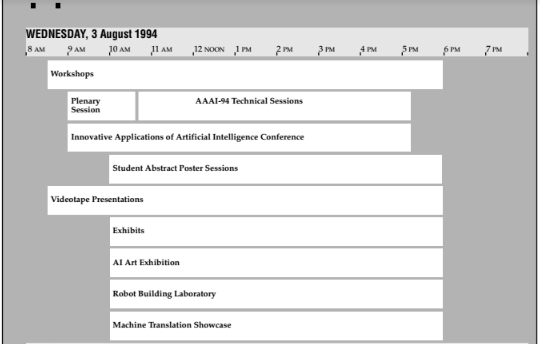
Wednesday Morning
Wednesday Morning, August 3
7:30 AM – 6:00 PM Conference Registration Lobby of Hall 4B, Washington State Convention & Trade Center
10:00 AM – 6:00 PM AI Art Exhibition Room 618-620, Washington State Convention & Trade Center
10:00 AM – 6:00 PM Exhibits Hall 6E, Washington State Convention & Trade Center
10:00 AM – 6:00 PM Machine Translation Showcase Hall 4B, Washington State Convention & Trade Center
10:00 AM – 6:00 PM Robot Building Laboratory(Observation only) Participant hours are continuous throughout the week. Hall 4C (Entry through Hall 4B), Washington State Convention & Trade Center
10:00 AM – 6:00 PM Student Abstract Poster Sessions Hall 6E, Washington State Convention & Trade Center
8:30 AM – 6:00 PM Videotape Presentations Room 615, Washington State Convention & Trade Center
Workshops
8:30 AM – 12:30 PM AI in Business Process Reengineering (W5), Organized by Walter Hamscher Room 613, Washington State Convention & Trade Center
8:30 AM – 6:00 PM Integration of Natural Language and Vision Processing (W13), Organized by Paul McKevitt Room 602, Washington State Convention & Trade Center
8:30 AM – 6:00 PM Representing and Reasoning with Device Function (W18), Organized by Jack Hodges Room 603, Washington State Convention & Trade Center
National Conference on Artificial Intelligence (AAAI–94)
9:00 – 10:10 AM Plenary Session: AAAI Presidential Address—Collaborative Systems, Barbara Grosz, Harvard University Hall 6BC, Washington State Convention & Trade Center
10:10 – 10:30 AM AAAI-94 Session Break
10:30 AM – 12:10 PM AAAI-94 Invited Talk: The Synergy of AI, Art, and Interactive Entertainment, by Joseph Bates, Carnegie Mellon University. Introduction by Raj Reddy, Carnegie Mellon University Hall 6BC, Washington State Convention & Trade Center
AI often has kept its distance from the Arts. There are reasons, both intellectual and economic, for this to change.
First, art makes clear its dependence on creativity, intuition, and emotion. The human capacities these names denote are little studied by AI. Striving to develop machines capable in these areas almost certainly will shed light on modeling human abilities in general.
Second, like AI researchers, artists often are deeply concerned with abstracting and modeling humans. A playwright building a character tries to find the right mix of qualities, from appearance through action and speech up to goals, emotion, and personality, to capture the essence of a particular person. From their studies, artists bring different and useful insights to the long held AI dream of creating apparently living, human-like creatures.
Finally, market forces and relentless progress in semiconductors are leading to inexpensive game machines with the power of high-end graphics workstations. AI and Hollywood, working together, might produce deeply interactive entertainment of interest to a much broader range of people than the traditional game audience. This potentially huge market is providing strong economic incentives for AI researchers and the entertainment industry to collaborate.
This talk presents these intellectual and economic synergies, with a technical focus on constructing believable interactive characters, or “believable agents.”
10:30 AM – 11:50 PM Session 14: Planning: Representation Room 606, Washington State Convention & Trade Center Session Chair: Austin Tate
10:30 – 10:50 AM Causal Pathways of Rational Action, by Charles L. Ortiz, Jr., University of Pennsylvania
10:50 – 11:10 AM Temporal Reasoning with Constraints on Fluents and Events, by Eddie Schwalb, Kalev Kask and Rina Dechter, University of California, Irvine
11:10 – 11:30 AM On the Nature of Modal Truth Criteria in Planning, by Subbarao Kambhampati, Arizona State University and Dana S. Nau, University of Maryland
11:30 AM – 11:50 PM Omnipotence without Omniscience: Efficient Sensor Management for Planning, by Keith Golden, Oren Etzioni and Daniel Weld, University of Washington
10:30 AM – 12:10 PM Session 15: Spatial Reasoning Room 607, Washington State Convention & Trade Center Session Chair: Tom Dean
10:30 – 10:50 AM Spatial Reasoning in Indeterminate Worlds, by Janice Glasgow, Queen’s University
10:50 – 11:10 AM A Model for Integrated Qualitative Spatial and Dynamic Reasoning about Physical Systems, by Raman Rajagopalan, University of Texas at Austin
11:10 – 11:30 AM A Theory for Qualitative Spatial Reasoning Based on Order Relations, by Ralf Röhrig, University of Hamburg
11:30 – 11:50 AM Automatic Depiction of Spatial Descriptions, by Patrick Olivier, University of Wales; Toshiyuki Maeda, Matsushita Electric Ind. Co. Ltd.; Jun-ichi Tsujii, University of Manchester
11:50 AM – 12:10 PM Basic Meanings of Spatial Relations: Computation and Evaluation in 3D Space, by Klaus-Peter Gapp, Universität des Saarlandes
10:30 AM – 12:10 PM Session 16: Natural Language Applications Room 608, Washington State Convention & Trade Center Session Chair: Eugene Charniak
10:30 – 10:50 AM AAAI-94 Outstanding Paper Award Winner: A Prototype Reading Coach that Listens, by Jack Mostow, Steven F. Roth, Alexander G. Hauptmann and Matthew Kane, Carnegie Mellon University
10:50 – 11:10 AM Automated Postediting of Documents, by Kevin Knight and Ishwar Chander, USC/Information Sciences Institute
11:10 – 11:30 AM Visual Semantics: Extracting Visual Information from Text Accompanying Pictures, by Rohini K. Srihari and Debra T. Burhans, State University of New York at Buffalo
11:30 – 11:50 AM Building a Large-Scale Knowledge Base for Machine Translation, by Kevin Knight and Steve K. Luk, USC/Information Sciences Institute
11:50 AM – 12:10 PM Kalos – A System for Natural Language Generation with Revision, by Ben E. Cline and J. Terry Nutter, Virginia Polytechnic Institute and State University
10:30 AM – 12:10 PM Session 17: Case-Based Reasoning Room 609, Washington State Convention & Trade Center Session Chair: David Leake
10:30 – 10:50 AM Towards More Creative Case-Based Design Systems, by Linda M. Wills and Janet L. Kolodner, Georgia Institute of Technology
10:50 – 11:10 AM Retrieving Semantically Distant Analogies with Knowledge-Directed Spreading Activation, by Michael Wolverton and Barbara Hayes-Roth, Stanford University
11:10 – 11:30 AM Heuristic Harvesting of Information for Case-Based Argument, by Edwina L. Rissland, David B. Skalak and M. Timur Friedman, University of Massachusetts
11:30 – 11:50 AM Case-Based Acquisition of User Preferences for Solution Improvement in Ill Structured Domains, by Katia Sycara, Carnegie Mellon University and Kazuo Miyashita, Matsushita Electric Industrial Co.
11:50 AM – 12:10 PM Experience-Aided Diagnosis for Complex Devices, by Michael P. Féret and Janice I. Glasgow, Queen’s University
10:30 AM – 12:10 PM Session 18: Perception Room 611/612, Washington State Convention & Trade Center Session Chair: Eric Horvitz
10:30 – 10:50 AM Topological Mapping for Mobile Robots Using a Combination of Sonar and Vision Sensing, by David Kortenkamp and Terry Weymouth, University of Michigan
10:50 – 11:10 AM Sensible Decisions: Toward a Theory of Decision-Theoretic Information Invariants, by Keiji Kanazawa, University of California, Berkeley
11:10 – 11:30 AM A New Approach to Tracking 3D Objects in 2D Image Sequences, by Michael Chan and Dimitri Metaxas, University of Pennsylvania; Sven Dickinson, University of Toronto
11:30 – 11:50 AM Automatic Symbolic Traffic Scene Analysis Using Belief Networks, by T. Huang, D. Koller, J. Malik, G. Ogasawara, B. Rao, S. Russell and J. Weber, University of California, Berkeley
11:50 AM – 12:10 PM Applying VC-Dimension Analysis to 3D Object Recognition from Perspective Projections, by Michael Lindenbaum and Shai Ben-David, Technion
12:10 – 1:30 PM AAAI-94 Lunch Break
Innovative Applications of Artificial Intelligence Conference (IAAI–94)
Hall 6A, Washington State Convention & Trade Center
9:00 – 9:30 AM The Operations Overtime Scheduling System, by A. Chris Eizember, E.I. duPont de Nemours & Co., Inc.
9:30 – 10:00 AM CCTIS: An Expert Transactions Processing System, by Terrance Swift, SUNY at Stony Brook; Calvin C. Henderson, Richard Holberger and Edward Neham, Systems Development and Analysis; John Murphy, DHD Systems, Inc.
10:00 – 10:20 AM IAAI-94 Session Break
10:20 – 11:30 AM Invited Talk: Commercial Natural Language: Critical Success Factors, by Larry Harris, Linguistic Technology
A number of commercial natural language products have been moderately successful in the marketplace, but none of them have been as successful as we would have hoped. This session will address the technological and marketing issues that are critical to the success of commercial natural; language systems. The real issues are not necessarily where we expected them to be.
11:30 AM – 12:00 PM Meet the Authors
12:00 – 2:00 PM IAAI-94 Lunch Break
Wednesday Afternoon
Wednesday Afternoon, August 3
Special Meetings
12:15 – 12:45 PM AAAI Annual Business Meeting Room 608, Washington State Convention & Trade Center
2:30 – 5:00 PM Robot Forum (by invitation only) Room 604, Washington State Convention & Trade Center
National Conference on Artificial Intelligence (AAAI–94)
1:30 – 3:10 PM AAAI-94 Invited Talks Hall 6BC, Washington State Convention & Trade Center
1:30 – 2:20 PM Development of Knowledge-Based Systems from Reusable Components, by Mark Musen, Stanford University School of Medicine. Introduction by Bruce Buchanan, University of Pittsburgh
There are multiple dimensions of knowledge sharing and reuse. Although much work to date has concentrated on development of standards for declarative knowledge representation, the engineering of large-scale knowledge-based systems requires attention not only to representation of propositions about the world being modeled, but also to the control knowledge that allows complex problem-solving to take place. For the past several years, our research group has been building a development environment, known as PROTEGE-II, that permits reuse of knowledge in multiple ways. PROTEGE-II supports libraries of reusable role-limiting problem-solving methods that define—in domain—independent terms—the manner in which propositional domain knowledge may be used to solve application tasks. PROTEGE-II also allows system builders to create and edit domain ontologies—which themselves may be reusable—and to map those ontologies to the knowledge requirements of role-limiting problem-solving methods in well-defined ways. The result is an architecture that offers system builders the ability to develop knowledge-based systems from reusable domain ontologies and from problem-solving-method building blocks. Furthermore, PROTEGE-II processes domain ontologies to generate automatically domain-specific knowledge-acquisition tools that application experts can use independently to enter the content knowledge required to define individual application tasks.
2:20 – 3:10 PM Learning and Intelligent Agents, by Leslie Pack Kaelbling, Brown University. Introduction by Stan Rosenschein, Teleos
Much of the work on intelligent agents addresses architectures for action selection. Even the best architecture will not allow a human to build correct programs for poorly understood environments. Either the human or the robot must learn a good program through trial and error. In this talk, I will discuss reinforcement learning, a framework for learning behaviors through trial and error. I will highlight some of the major research problems, focus on a few specific solutions, then speculate about the integration of learning into the larger framework of intelligent agent design.
1:30 – 3:10 PM Session 19: Art / Music and Audition Room 606, Washington State Convention & Trade Center Session Chair: Joseph Bates
1:30 – 1:50 PM Art
1:30 – 1:50 PM Criticism, Culture, and the Automatic Generation of Artworks, by Lee Spector and Adam Alpern, Hampshire College
1:50 – 3:10 PM Music and Audition
1:50 – 2:10 PM The Synergy of Music Theory and AI: Learning Multi-Level Expressive Interpretation, by Gerhard Widmer, University of Vienna and the Austrian Research Institute for Artificial Intelligence
2:10 – 2:30 PM Simulating Creativity in Jazz Performance, by Geber Ramalho and Jean-Gabriel Ganascia, Université Paris VI
2:30 – 2:50 PM Automated Accompaniment of Musical Ensembles, by Lorin Grubb and Roger B. Dannenberg, Carnegie Mellon University
2:50 – 3:10 PM Auditory Stream Segregation in Auditory Scene Analysis with a MultiAgent System, by Tomohiro Nakatani, Hiroshi G. Okuno, and Takeshi Kawabata, NTT Basic Research Laboratories
1:30 – 2:50 PM Session 20: Belief Revision Room 607, Washington State Convention & Trade Center Session Chair: Adam Grove
1:30 – 1:50 PM Qualitative Decision Theory, by Sek-Wah Tan and Judea Pearl, University of California, Los Angeles
1:50 – 2:10 PM Incremental Recompilation of Knowledge, by Goran Gogic and Christos H. Papadimitriou, University of California, San Diego; Martha Sideri, Athens University of Economics and Business
2:10 – 2:30 PM Conditional Logics of Belief Change, by Nir Friedman, Stanford University and Joseph Y. Halpern, IBM Almaden Research Center
2:30 – 2:50 PM On the Relation between the Coherence and Foundations Theories of Belief Revision, by Alvaro del Val, Stanford University
1:30 – 3:10 PM Session 21: Qualitative Reasoning: Modeling Room 608, Washington State Convention & Trade Center Session Chair: P. Pandurang Nayak
1:30 – 1:50 PM Using Qualitative Physics to Build Articulate Software for Thermodynamics Education, by Kenneth D. Forbus, Northwestern University and Peter B. Whalley, Oxford University
1:50 – 2:10 PM Automated Modeling for Answering Prediction Questions: Selecting the Time Scale and System Boundary, by Jeff Rickel and Bruce Porter, University of Texas
2:10 – 2:30 PM Decompositional Modeling through Caricatural Reasoning, by Brian C. Williams and Olivier Raiman, Xerox Palo Alto Research Center
2:30 – 2:50 PM A Qualitative Physics Compiler, by Adam Farquhar, Stanford University
2:50 – 3:10 PM Automated Model Selection for Simulation, by Yumi Iwasaki, Stanford University and Alon Y. Levy, AT&T Bell Laboratories
1:30 – 3:10 PM Session 22: Constraint Satisfaction Techniques Room 609, Washington State Convention & Trade Center Session Chair: Steve Minton
1:30 – 1:50 PM Noise Strategies for Improving Local Search, by Bart Selman, Henry A. Kautz and Bram Cohen, AT&T Bell Laboratories
1:50 – 2:10 PM Improving Repair-Based Constraint Satisfaction Methods by Value Propagation, by Nobuhiro Yugami, Yuiko Ohta, and Hirotaka Hara, Fujitsu Laboratories Ltd.
2:10 – 2:30 PM GENET: A Connectionist Architecture for Solving Constraint Satisfaction Problems by Iterative Improvement, by Andrew Davenport, Edward Tsang, Chang J. Wang, and Kangmin Zhu, University of Essex
2:30 – 2:50 PM Expected Gains from Parallelizing Constraint Solving for Hard Problems, by Tad Hogg and Colin P. Williams, Xerox Palo Alto Research Center
2:50 – 3:10 PM Planning from First Principles for Geometric Constraint Satisfaction, by Sanjay Bhansali, Washington State University and Glenn A. Kramer, Enterprise Integration Technologies
1:30 – 3:10 PM Session 23: Discovery / Meta AI Room 611/612, Washington State Convention & Trade Center Session Chair: Katia Sycara
1:30 – 2:30 PM Discovery
1:30 – 1:50 PM A Discovery System for Trigonometric Functions, by Tsuyoshi Murata, Masami Mizutani and Masamichi Shimura, Tokyo Institute of Technology
1:50 – 2:10 PM Bootstrapping Training-Data Representations for Inductive Learning: A Case Study in Molecular Biology, by Haym Hirsh and Nathalie Japkowicz, Rutgers University
2:10 – 2:30 PM An Implemented Model of Punning Riddles, by Kim Binsted and Graeme Ritchie, University of Edinburgh
2:30 – 3:10 PM Meta AI
2:30 – 2:50 PM Using Knowledge Acquisition and Representation Tools to Support Scientific Communities, by Brian R. Gaines and Mildred L. G. Shaw, University of Calgary
2:50 – 3:10 PM Talking About AI: Socially Defined Linguistic Subcontexts in AI, by Amy M. Steier and Richard K. Belew, University of California, San Diego
3:10 – 3:30 PM AAAI-94 Session Break
3:30 – 5:10 pm AAAI-94/IAAI-94 Joint Panel: Providing Solutions: The Next Generation of AI Products. Organized by Monte Zweben, President, Red Pepper Software Hall 6BC, Washington State Convention & Trade Center
Panelists: Peter Friedland, Nasa Ames, Tom Laffey, Chief Technology Officer, Talarian; Jay Weber, Director of Research and Development, EIT; Masud Arjmand, Associate Partner, Andersen Consulting; Patrick Albert, Director of Research and Development, ILOG
The expert system companies that flourished in the the early eighties are now scrambling to redefine themselves. Some market their products as object-oriented development tools. Others are positioning themselves as application software companies. This panel will discuss the next-generation of companies that use AI to solve business problems. How will these companies avoid the traps encountered by their predecessors? What are their business challenges? What are their technical challenges? Do these companies highlight their AI technology or do they conceal it? Is AI the critical technology enabling their products and services? These and other questions will be addressed in an open discussion between the panel members and the audience.
3:30 – 5:10 PM Session 24: Knowledge Bases / Distributed AI: Software Agents Room 606, Washington State Convention & Trade Center Session Chair: Oren Etzioni
3:30 – 4:30 PM Knowledge Bases
3:30 – 3:50 PM Extracting Viewpoints from Knowledge Bases, by Liane Acker, IBM Corporation and Bruce Porter, University of Texas at Austin
3:50 – 4:10 PM Formalizing Ontological Commitment, by Nicola Guarino, National Research Council, Italy; Massimiliano Carrara; Pierdaniele Giaretta, University of Padova
4:10 – 4:30 PM Using Induction to Refine Information Retrieval Strategies, by Catherine Baudin and Barney Pell, NASA Ames Research Center; Smadar Kedar, Northwestern University
4:30 – 5:10 PM Distributed AI: Software Agents
4:30 – 4:50 PM Collaborative Interface Agents, by Yezdi Lashkari, Max Metral and Pattie Maes, MIT Media Laboratory
4:50 – 5:10 PM An Experiment in the Design of Software Agents, by Henry Kautz, Bart Selman, Michael Coen, Stephen Ketchpel and Chris Ramming, AT&T Bell Laboratories
3:30 – 5:10 PM Session 25: Search Room 607, Washington State Convention & Trade CenterSession Chair: Matt Evett
3:30 – 3:50 PM ITS: An Efficient Limited-Memory Heuristic Tree Search Algorithm, by Subrata Ghosh and Dana S. Nau, University of Maryland; Ambuj Mahanti, Indian Institute of Management Calcutta
3:50 – 4:10 PM Memory-Bounded Bidirectional Search, by Hermann Kaindl, Siemens AG and Aliasghar Khorsand
4:10 – 4:30 PM The Trailblazer Search: A New Method for Searching and Capturing Moving Targets, by Fumihiko Chimura and Mario Tokoro, Keio University
4:30 – 4:50 PM Exploiting Algebraic Structure in Parallel State Space Search, by Jonathan Bright, Simon Kasif and Lewis Stiller, The Johns Hopkins University
4:50 – 5:10 PM Epsilon-Transformation: Exploiting Phase Transitions to Solve Combinatorial Optimization Problems– Initial Results, by Weixiong Zhang and Joseph C. Pemberton, University of California, Los Angeles
3:30 – 4:40 PM Session 26: Neural Nets I Room 608, Washington State Convention & Trade Center Session Chair: Norman Sadeh
3:30 – 3:50 PM Unclear Distinctions Lead to Unnecessary Shortcomings: Examining the Rule Versus Fact, Role Versus Filler, and Type Versus Predicate Distinctions from a Connectionist Representation and Reasoning Perspective, by Venkat Ajjanagadde, Universitaet Tuebingen
3:50 – 4:10 PM Parsing Embedded Clauses with Distributed Neural Networks, by Risto Miikkulainen, University of Texas at Austin and Dennis Bijwaard, University of Twente
4:10 – 4:30 PM Spurious Symptom Reduction in Fault Monitoring Using a Neural Network and Knowledge Base Hybrid System, by Roger M. Records and Jai J. Choi, Boeing Computer Services
4:30 – 4:50 PM Knowledge Matrix—An Explanation and Knowledge Refinement Facility for a Rule Induced Neural Network, by Daniel S. Yeung and Hank-shun Fong, Hong Kong Polytechnic
3:30 – 4:50 PM Session 27: Induction Room 609, Washington State Convention & Trade Center Session Chair: David Aha
3:30 – 3:50 PM Learning to Recognize Promoter Sequences in E. coli by Modeling Uncertainty in the Training Data, by Steven W. Norton, Rutgers University
3:50 – 4:10 PM Inductive Learning for Abductive Diagnosis, by Cynthia A. Thompson and Raymond J. Mooney, University of Texas
4:10 – 4:30 PM Learning Fault-Tolerant Speech Parsing with SCREEN, by Stefan Wermter and Volker Weber, University of Hamburg
4:30 – 4:50 PM Compositional Instance-Based Learning, by Patrick Broos and Karl Branting, University of Wyoming
Innovative Applications of Artificial Intelligence Conference (IAAI–94)
Hall 6A, Washington State Convention & Trade Center
2:00 – 2:30 PM The VLS Tech Assist Expert System (VTAEXS), by Robert A. Small, Vitro Corporation and Bryan Yoshimoto, Naval Surface Warfare Center
2:30 – 3:00 PM ASAP – An Advisory System for Automated Procurement, by Robert Chalmers, Robin Pape, Robert Rieger and William Shirado, Lockheed Palo Alto Research Laboratories
3:00 – 3:30 PM IAAI-94 Break/Meet-the-Author Session
3:30 – 5:10 PM AAAI-94/IAAI-94 Joint Panel: Providing Solutions: The Next Generation of AI Products. Organized by Monte Zweben, President, Red Pepper Software Hall 6BC, Washington State Convention & Trade Center
Thursday Morning
Thursday Morning, August 4
8:00 AM – 5:00 PM Conference Registration Lobby of Hall 4B, Washington State Convention & Trade Center
8:30 AM – 6:00 PM AI Art Exhibition Room 618-620, Washington State Convention & Trade Center
8:30 AM – 6:00 PM Machine Translation Showcase Hall 4B, Washington State Convention & Trade Center
8:30 AM – 6:00 PM Robot Building Laboratory (Observation only) Participant hours are continuous throughout the week. Hall 4C (Entry through Hall 4B), Washington State Convention & Trade Center
8:30 AM – 5:10 PM Student Abstract Poster Sessions. Please see schedule elsewhere in this program. Rooms 616-17, Washington State Convention & Trade Center
8:30 AM – 6:00 PM Videotape Presentations Room 610, Washington State Convention & Trade Center
Special Meetings
7:30 – 8:30 AM AAAI Conference Committee Meeting Madrona Room, Sheraton Seattle
Workshops
8:30 AM – 6:00 PM Models of Conflict Management in Cooperative Problem Solving (W15), Organized by Susan Lander Room 604, Washington State Convention & Trade Center
8:30 AM – 6:00 PM Reasoning about the Shop Floor (SIGMAN) (W17), Organized by Leslie Interrante Room 603, Washington State Convention & Trade Center
8:30 AM – 6:00 PM Validation and Verification of Knowledge-Based Systems (W20), Organized by Robert Plant Room 602, Washington State Convention & Trade Center
National Conference on Artificial Intelligence (AAAI–94)
8:30 – 10:10 AM AAAI-94 Invited Talks Hall 6BC, Washington State Convention & Trade Center
8:30 – 9:20 AM The Evolution of Emergent Computation, by Melanie Mitchell, Santa Fe Institute. Introduction by Oren Etzioni, University of Washington
How does evolution produce sophisticated emergent computation in systems composed of simple components limited to local interactions? In this talk I will describe a model of such a process, in which a genetic algorithm was used to evolve cellular automata to perform a computational task requiring globally-coordinated information processing. On a subset of runs a number of quite sophisticated novel computational strategies was discovered. I will analyze the emergent logic underlying these strategies in terms of information processing performed by “particles” in space-time, and describe in detail the temporal mechanisms by which the genetic algorithm discovered these strategies. This analysis is a preliminary step in understanding the general mechanisms by which sophisticated emergent computational capabilities can be automatically produced in decentralized multiprocessor systems.
9:20 – 10:10 AM Can You Explain That Again? by Johanna Moore, University of Pittsburgh. Introduction by William Swartout, University of Southern California
Even the most cursory examination of human dialogues reveals that they are not a series of isolated utterances. Communication is an inherently incremental and interactive process, and dialogue participants freely refer to the context created by the ongoing conversation—they ask for elaboration or clarification of things they don’t understand, they take issue with statements with which they disagree, and they point out relationships between what’s currently being discussed and topics that have been covered earlier. Natural language interfaces that do not model discourse context are frustrating to users because the utterances they generate are unnatural, repetitive, and even incoherent.
In this talk, I describe approaches to building systems that can participate effectively in dialogues with their users. In particular, I argue that to appropriately interpret users’ utterances and produce context-sensitive responses, it is necessary to model and reason about the plans that the speakers in a discourse are attempting to carry out. I describe how lessons learned in natural language can be applied to multimedia dialogues.
8:30 – 10:10 AM Session 28: Scheduling Room 606, Washington State Convention & Trade Center Session Chair: Shlomo Zilberstein
8:30 – 8:50 AM Experimental Results on the Application of Satisfiability Algorithms to Scheduling Problems, by James M. Crawford and Andrew B. Baker, University of Oregon
8:50 – 9:10 AM Generating Feasible Schedules under Complex Metric Constraints, by Cheng Chung Cheng and Stephen F. Smith, Carnegie Mellon University
9:10 – 9:30 AM Just-In-Case Scheduling, by Mark Drummond, John Bresina, and Keith Swanson, NASA Ames Research Center
9:30 – 9:50 AM A Constraint-Based Approach to High-School Timetabling Problems: A Case Study, by Masazumi Yoshikawa, Kazuya Kaneko, Yuriko Nomura and Masanobu Watanabe, NEC Corporation
9:50 – 10:10 AM On the Utility of Bottleneck Reasoning for Scheduling, by Nicola Muscettola, RECOM Technologies, NASA Ames Research Center
8:30 – 10:10 AM Session 29: Reinforcement Learning / PAC Learning Room 607, Washington State Convention & Trade Center Session Chair: Leslie Pack Kaelbling
8:30 – 9:30 AM Reinforcement Learning
8:30 – 8:50 AM Catching a Baseball: A Reinforcement Learning Perspective Using a Neural Network, by Rajarshi Das, Santa Fe Institute and Sreerupa Das, University of Colorado
8:50 – 9:10 AM Reinforcement Learning Algorithms for Average-Payoff Markovian Decision Processes, by Satinder P. Singh, Massachusetts Institute of Technology
9:10 – 9:30 AM Incorporating Advice into Agents that Learn from Reinforcements, by Richard Maclin and Jude W. Shavlik, University of Wisconsin
9:30 – 10:10 AM PAC Learning
9:30 – 9:50 AM Pac-Learning Nondeterminate Clauses, by William W. Cohen, AT&T Bell Labs
9:50 – 10:10 AM Learning to Reason, by Roni Khardon and Dan Roth, Harvard University
8:30 – 10:10 AM Session 30: Robot Control, Locomotion and Manipulation Room 608, Washington State Convention & Trade Center Session Chair: Peter Bonasso
8:30 – 8:50 AM Merging Path Planners and Controllers through Local Context, by Sundar Narasimhan, MIT Artificial Intelligence Laboratory
8:50 – 9:10 AM Teleassistance: Contextual Guidance for Autonomous Manipulation, by Polly K. Pook and Dana H. Ballard, University of Rochester
9:10 – 9:30 AM Automatically Tuning Control Systems for Simulated Legged Robots, by Robert Ringrose, MIT Artificial Intelligence Laboratory
9:30 – 9:50 AM Reactive Deliberation: An Architecture for Real-Time Intelligent Control in Dynamic Environments, by Michael K. Sahota, University of British Columbia
9:50 – 10:10 AM Robot Behavior Conflicts: Can Intelligence Be Modularized? by Amol Dattatraya Mali and Aimtabha Mukerjee, Indian Institute of Technology
8:30 – 10:10 AM Session 31: Enabling Technologies Room 609, Washington State Convention & Trade Center Session Chair: Adam Farquhar
8:30 – 8:50 AM Discovering Procedural Executions of Rule-Based Programs, by David Gadbois and Daniel Miranker, University of Texas at Austin
8:50 – 9:10 AM Mechanisms for Efficiency in Blackboard Systems, by Michael Hewett, University of Texas at Austin and Rattikorn Hewett, Florida Atlantic University
9:10 – 9:30 AM The Relationship Between Architectures and Example-Retrieval Times, by Eiichiro Sumita, Naoya Nisiyama and Hitoshi Iida, ATR Interpreting Telecommunications Research Laboratories
9:30 – 9:50 AM Model-Based Automated Generation of User Interfaces, by Angel R. Puerta, Henrik Eriksson, John H. Gennari and Mark A. Musen, Stanford University
9:50 – 10:10 AM Combining Left and Right Unlinking for Matching a Large Number of Learned Rules, by Robert B. Doorenbos, Carnegie Mellon University
8:30 – 10:10 AM Session 32: Description Logic / Formal Models of Reactive Control Room 611/612, Washington State Convention & Trade Center Session Chair: Christer Bäckström
8:30 – 9:30 AM Description Logic
8:30 – 8:50 AM Boosting the Correspondence between Description Logics and Propositional Dynamic Logics, by Giuseppe De Giacomo and Maurizio Lenzerini, Università di Roma
8:50 – 9:10 AM Refining the Structure of Terminological Systems: Terminology = Schema + Views, by Martin Buchheit and Werner Nutt, German Research Center for Artificial Intelligence; Francesco M. Donini and Andrea Schaerf, Università di Roma
9:10 – 9:30 AM A Description Classifier for the Predicate Calculus, by Robert M. MacGregor, USC/Information Sciences Institute
9:30 – 10:10 AM Formal Models of Reactive Control
9:30 – 9:50 AM Estimating Reaction Plan Size, by Marcel Schoppers, Robotics Research Harvesting
9:50 – 10:10 AM Structured Circuit Semantics for Reactive Plan Execution Systems, by Jaeho Lee and Edmund H. Durfee, University of Michigan
10:10 – 10:30 AM AAAI-94 Session Break
10:30 AM – 12:10 PM AAAI-94 Invited Talk: Using Neural Networks to Learn Intractable Generative Models, by Geoffrey E. Hinton, University of Toronto. Introduction by Eugene Charniak, Brown University Hall 6BC, Washington State Convention & Trade Center
I will describe some unsupervised learning algorithms that allow neural networks to create internal representations of the underlying causes of their sensory inputs. Some of the simpler algorithms are just variants of well-known statistical techniques. But the algorithms get far more interesting when the generative relationship between the underlying representation and the observed data is more complicated. In such cases we need two neural networks that are trained together. The generative network models the way in which underlying causes give rise to observations and the recognition network learns to approximately invert this generative process in order to extract the underlying causes from the observed data. More precisely, the recognition network computes a probability distribution across possible underlying causes. When an observation can have multiple simultaneous causes it is intractable to compute the correct probability distribution, but I shall show that a tractable approximation to this distribution is all that is required to allow the generative model to be learned. Thus the ability of the recognition net to approximate the right distribution enables us to learn far more complex generative models than those that are typically used by statisticians.
10:30 AM – 12:10 PM Session 33: Theater and Video / Believable Agents Room 606, Washington State Convention & Trade Center Session Chair: Joseph Bates
10:30 – 11:10 AM Theater and Video
10:30 – 10:50 AM Semi-Autonomous Animated Actors, by Steve Strassmann, Apple Computer Inc.
10:50 – 11:10 AM Knowledge Representation for Video, by Marc Davis, Interval Research Corporation
11:10 AM – 12:10 PM Believable Agents
11:10 – 11:30 AM Social Interaction: Multimodal Conversation with Social Agents, by Katashi Nagao and Akikazu Takeuchi, Sony Computer Science Laboratory Inc.
11:30 – 11:50 AM Research Problems in the Use of a Shallow Artificial Intelligence Model of Personality and Emotion, by Clark Elliott, DePaul University
11:50 AM – 12:10 PM ChatterBots, TinyMuds, and the Turing Test: Entering the Loebner Prize Competition, by Michael L. Mauldin, Carnegie Mellon University
10:30 AM – 12:10 PM Session 34: Causal Reasoning Room 607, Washington State Convention & Trade Center Session Chair: Joseph Halpern
10:30 – 10:50 AM Forming Beliefs about a Changing World, by Fahiem Bacchus, University of Waterloo; Adam J. Grove, NEC Research Institute; Joseph Y. Halpern, IBM Almaden Research Center; Daphne Koller, University of California, Berkeley
10:50 – 11:10 AM Causal Default Reasoning: Principles and Algorithms, by Hector Geffner, Universidad Simón Bolívar
11:10 – 11:30 AM Symbolic Causal Networks, by Adnan Darwiche, Rockwell International Science Center and Judea Pearl, University of California, Los Angeles
11:30 – 11:50 AM Probabilistic Evaluation of Counterfactual Queries, by Alexander Balke and Judea Pearl, University of California, Los Angeles
11:50 AM – 12:10 PM Testing Physical Systems, by Peter Struss, Technical University of Munich
10:30 AM – 12:10 PM Session 35: Natural Language Discourse Room 608, Washington State Convention & Trade Center Session Chair: Sandra Carberry
10:30 – 10:50 AM Classifying Cue Phrases in Text and Speech Using Machine Learning, by Diane J. Litman, AT&T Bell Laboratories
10:50 – 11:10 AM Emergent Linguistic Rules from Inducing Decision Trees: Disambiguating Discourse Clue Words, by Eric V. Siegel and Kathleen R. McKeown, Columbia University
11:10 – 11:30 AM A Plan-Based Model for Response Generation in Collaborative Task-Oriented Dialogues, by Jennifer Chu-Carroll and Sandra Carberry, University of Delaware
11:30 – 11:50 AM An Artificial Discourse Language for Collaborative Negotiation, by Candace L. Sidner, Lotus Development Corporation
11:50 AM – 12:10 PM Corpus-Driven Knowledge Acquisition for Discourse Analysis, by Stephen Soderland and Wendy Lehnert, University of Massachusetts
10:30 AM – 12:10 PM Session 36: Control Learning Room 609, Washington State Convention & Trade Center Session Chair: Russell Greiner
10:30 – 10:50 AM Exploiting the Ordering of Observed Problem-Solving Steps for Knowledge Base Refinement: An Apprenticeship Approach, by Steven K. Donoho and David C. Wilkins, University of Illinois
10:50 – 11:10 AM Improving Learning Performance through Rational Resource Allocation, by Jonathan Gratch and Gerald DeJong, University of Illinois; Steve Chien, JPL/California Institute of Technology
11:10 – 11:30 AM Creating Abstractions Using Relevance Reasoning, by Alon Y. Levy, AT&T Bell Laboratories
11:30 – 11:50 AM Flexible Strategy Learning: Analogical Replay of Problem Solving Episodes, by Manuela M. Veloso, Carnegie Mellon University
11:50 AM – 12:10 PM Learning Explanation-Based Search Control Rules for Partial Order Planning, by Suresh Katukam and Subbarao Kambhampati, Arizona State University
10:30 – 11:50 AM Session 37: Tractable Constraint-Satisfaction Problems Room 611/612, Washington State Convention & Trade Center Session Chair: James Crawford
10:30 – 10:50 AM Reasoning about Temporal Relations: A Maximal Tractable Subclass of Allen’s Interval Algebra, by Bernhard Nebel, Universität Ulm and Hans-Jürgen Bürckert, DFKI
10:50 – 11:10 AM On the Inherent Level of Local Consistency in Constraint Networks, by Peter van Beek, University of Alberta
11:10 – 11:30 AM A Filtering Algorithm for Constraints of Difference in CSPs, by Jean-Charles Régin, Université Montpellier II
11:30 – 11:50 AM An Approach to Multiply Segmented Constraint Satisfaction Problems, by Randall A. Helzerman and Mary P. Harper, Purdue University
12:10 – 2:00 PM AAAI-94 Lunch Break
Thursday Afternoon
Thursday Afternoon, July 15
Special Meeting
12:15 – 1:30 PM AAAI Press Editorial Board Meeting Madrona Room, Sheraton Seattle
National Conference on Artificial Intelligence (AAAI–94)
1:30 – 3:10 pm AAAI-94 Invited Talk: Robots Beyond the Lab and Factory, by William “Red” Whittaker, Carnegie Mellon University. Introduction by Richard Korf, University of California, Los Angeles Hall 6BC, Washington State Convention & Trade Center
1:30 – 3:10 PM Session 38: Planning: Agents Room 606, Washington State Convention & Trade Center Session Chair: Eric Horvitz
1:30 – 1:50 PM Using Abstraction and Nondeterminism to Plan Reaction Loops, by David J. Musliner, University of Maryland
1:50 – 2:10 PM Cost-Effective Sensing during Plan Execution, by Eric A. Hansen, University of Massachusetts
2:10 – 2:30 PM The First Law of Robotics (A Call to Arms), by Daniel Weld and Oren Etzioni, University of Washington
2:30 – 2:50 PM Acting Optimally in Partially Observable Stochastic Domains, by Anthony R. Cassandra, Leslie Pack Kaelbling and Michael L. Littman, Brown University
2:50 – 3:10 PM Using Abstractions for Decision-Theoretic Planning with Time Constraints, by Craig Boutilier and Richard Dearden, University of British Columbia
1:30 – 3:10 PM Session 39: Automated Reasoning II Room 607, Washington State Convention & Trade Center Session Chair: Peter Friedland
1:30 – 1:50 PM Small is Beautiful: A Brute-Force Approach to Learning First-Order Formulas, by Steven Minton and Ian Underwood, Recom Technologies, NASA Ames Research Center
1:50 – 2:10 PM On Kernel Rules and Prime Implicants, by Ron Rymon, University of Pittsburgh
2:10 – 2:30 PM An Empirical Evaluation of Knowledge Compilation by Theory Approximation, by Henry Kautz and Bart Selman, AT&T Bell Laboratories
2:30 – 2:50 PM Rule Based Updates on Simple Knowledge Bases, by Chitta Baral, University of Texas at El Paso
2:50 – 3:10 PM Can We Enforce Full Compositionality in Uncertainty Calculi? by Didier DuBois and Henri Prade, Université Paul Sabatier
1:30 – 3:10 PM Session 40: Uncertainty Management Room 608, Washington State Convention & Trade Center Session Chair: Adam Grove
1:30 – 1:50 PM Abstraction in Bayesian Belief Networks and Automatic Discovery from Past Inference Sessions, by Wai Lam, University of Waterloo
1:50 – 2:10 PM Noise and Uncertainty Management in Intelligent Data Modeling, by Xiaohui Liu, Gongxian Cheng and John Xingwang Wu, University of London
2:10 – 2:30 PM Focusing on the Most Important Explanations: Decision-Theoretic Horn Abduction, by Paul O’Rorke, University of California, Irvine
2:30 – 2:50 PM Markov Chain Monte-Carlo Algorithms for the Calculation of Dempster-Shafer Belief, by Serafín Moral, Universidad de Granada and Nic Wilson, Queen Mary and Westfield College
2:50 – 3:10 PM The Emergence of Ordered Belief from Initial Ignorance, by Paul Snow
1:30 – 3:10 PM Session 41: Corpus-Based Natural Language Processing Room 609, Washington State Convention & Trade Center Session Chair: Kevin Knight
1:30 – 1:50 PM Context-Sensitive Statistics for Improved Grammatical Language Models, by Eugene Charniak and Glenn Carroll, Brown University
1:50 – 2:10 PM A Probabilistic Algorithm for Segmenting Non-Kanji Japanese Strings, by Virginia Teller and Eleanor Olds Batchelder, The City University of New York
2:10 – 2:30 PM Some Advances in Transformation-Based Part of Speech Tagging, by Eric Brill, Massachusetts Institute of Technology
2:30 – 2:50 PM Inducing Deterministic Prolog Parsers from Treebanks: A Machine Learning Approach, by John M. Zelle and Raymond J. Mooney, University of Texas
2:50 – 3:10 PM Toward the Essential Nature of Statistical Knowledge in Sense Resolution, by Jill Fain Lehman, Carnegie Mellon University
1:30-3:10 PM Session 42: Distributed AI: Coordination Room 611/612, Washington State Convention & Trade Center Session Chair: Michael Huhns
1:30 – 1:50 PM Coalition, Cryptography and Stability: Mechanisms for Coalition Formation in Task Oriented Domains, by Gilad Zlotkin, Massachusetts Institute of Technology and Jeffrey S. Rosenschein, Hebrew University
1:50 – 2:10 PM Forming Coalitions in the Face of Uncertain Rewards, by Steven Ketchpel, Stanford University
2:10 – 2:30 PM The Impact of Locality and Authority on Emergent Conventions: Initial Observations, by James E. Kittock, Stanford University
2:30 – 2:50 PM Emergent Coordination through the Use of Cooperative State-Changing Rules, by Claudia V. Goldman and Jeffrey S. Rosenschein, Hebrew University
2:50 – 3:10 PM Learning to Coordinate without Sharing Information, by Sandip Sen, Mahendra Sekaran, and John Hale, University of Tulsa
3:10 – 3:30 PM AAAI-94 Session Break
3:30 – 5:10 PM AAAI-94 Invited Talk: NASA’s Artificial Intelligence Program: The First Decade, by Melvin D. Montemerlo, NASA Headquarters. Introduction by Peter Friedland, NASA Ames Research Center Hall 6BC, Washington State Convention & Trade Center
NASA’s artificial intelligence program began in 1985 and is nearing the end of its first decade. This talk will provide an historical perspective on that program. It will describe the evolution of the program in terms of: 1) the changing environment in which NASA has existed (Administrations, Congressional agendas, etc.), 2) the evolving management structure within NASA, and 3) the evolving opportunities, constraints and requirements which were presented to the AI program as those changes occurred. A description of the program’s major successes and failures and current state will be provided within this framework of an evolving environment. This provides a way of assessing the value of such a program, and a way of ascertaining what can be expected in the future. Presenting the NASA AI program in this manner also gives AI researchers and developers who use federal funds a view of what it takes to keep a federal research program going. A number of lessons learned will be presented on how the research community can best interface with such a program, and on how to manage such a program. Finally, an overview of the current federal environment for research programs will be presented, along with implications for NASA’s AI program and the AI R&D community.
3:30 – 4:50 PM Session 43: Neural Nets II Room 606, Washington State Convention & Trade Center Session Chair: Risto Miikkulainen
3:30 – 3:50 PM Learning To Learn: Automatic Adaption of Learning Bias, by Steve G. Romaniuk, National University of Singapore
3:50 – 4:10 PM Multi-Recurrent Networks for Traffic Forecasting, by Claudia Ulbricht, Austrian Research Institute for Artificial Intelligence
4:10 – 4:30 PM Associative Memory in an Immune-Based System, by Claude J. Gibert and Tom W. Routen, De Montfort University; Presented by Tim Watson, De Montfort University
4:30 – 4:50 PM Neural Programming Language, by Hava T. Siegelmann, Bar-Ilan University
3:30 – 5:10 PM Session 44: Learning Robotic Agents Room 607, Washington State Convention & Trade Center Session Chair: Jude Shavlik
3:30 – 3:50 PM Learning to Explore and Build Maps, by David Pierce and Benjamin Kuipers, University of Texas at Austin
3:50 – 4:10 PM Learning to Select Useful Landmarks, by Russell Greiner, Siemens Corporate Research and Ramana Isukapalli, Rutgers University
4:10 – 4:30 PM High Dimension Action Spaces in Robot Skill Learning, by Jeff G. Schneider, University of Rochester
4:30 – 4:50 PM Results on Controlling Action with Projective Visualization, by Marc Goodman, Cognitive Systems, Inc. and Brandeis University
4:50 – 5:10 PM Agents that Learn to Explain Themselves, by W. Lewis Johnson, USC/Information Sciences Institute
3:30 – 4:50 PM Session 45: Qualitative Reasoning: Simulation Room 608, Washington State Convention & Trade Center Session Chair: Yumi Iwasaki
3:30 – 3:50 PM Activity Analysis: The Qualitative Analysis of Stationary Points for Optimal Reasoning, by Brian C. Williams, Xerox Palo Alto Research Center and Jonathan Cagan, Carnegie Mellon University
3:50 – 4:10 PM Comparative Simulation, by Michael Neitzke and Bernd Neumann, Universität Hamburg
4:10 – 4:30 PM Qualitative Reasoning for Automated Exploration for Chaos, by Toyoaki Nishida, Nara Institute of Science and Technology
4:30 – 4:50 PM Intelligent Automated Grid Generation for Numerical Simulations, by KeThia Yao and Andrew Gelsey, Rutgers University
3:30 – 4:50 PM Session 46: Causal-Link Planning Room 609, Washington State Convention & Trade Center Session Chair: Reid Simmons
3:30 – 3:50 PM Derivation Replay for Partial-Order Planning, by Laurie H. Ihrig and Subbarao Kambhampati, Arizona State University
3:50 – 4:10 PM Least-Cost Flaw Repair: A Plan Refinement Strategy for Partial-Order Planning, by David Joslin and Martha E. Pollack, University of Pittsburgh
4:10 – 4:30 PM Tractable Planning with State Variables by Exploiting Structural Restrictions, by Peter Jonsson and Christer Bäckström, Linköping University
4:30 – 4:50 PM Temporal Planning with Continuous Change, by J. Scott Penberthy, IBM T. J. Watson Research Center and Daniel S. Weld, University of Washington
Student Abstracts
1994 Student Abstracts Presentation Schedule
Tuesday, August 2, 1994
10:30 AM – 12:10 PM Student Abstract Presentations Hall 6E, Washington State Convention & Trade Center Classification of Noun Phrases into Concepts or Individuals, by Saliha Azzam, CRIL Ingenierie
Regression Based Causal Induction with Latent Variable Models, by Lisa A. Ballesteros, University of Massachusetts/Amherst
Probabilistic Knowledge of External Events in Planning, by Jim Blythe, Carnegie Mellon University
DANIEL: Integrating Case-Based and Rule-Based Reasoning in Law, by Stefanie Bruninghaus, Universität Mannheim
Decision-Theoretic Plan Failure Debugging and Repair, by Lisa J. Burnell, University of Texas at Arlington
Decidability of Contextual Reasoning, by Vanja Buvac, Dartmouth College
Simplifying Bayesian Belief Nets while Preserving MPE or MPGE Ordering, by YaLing Chang, City University of New York
Abstract of the Forest Management Advisory Systems, by Yousong Chang and Donald Nute, University of Georgia
1:30 – 3:10 PM Student Abstract Presentations Hall 6E, Washington State Convention & Trade Center
SodaBot: A Software Agent Environment and Construction System, by Michael H. Coen, MIT Artificial Intelligence Laboratory
Empirical Knowledge Representation Generation Using N-Gram Clustering, by Robin Collier, University of Sheffield
Case-Based Introspection, by Michael T. Cox, Georgia Institute of Technology
Time Units and Calendars, by Diana Cukierman and James Delgrande, Simon Fraser University
Local Search in the Coordination of Intelligent Agents, by Daniel E. Damouth and Edmund H. Durfee, University of Michigan
GKR: A Generic Model of Knowledge Representation, by Angelica de Antonio, Jesus Cardenosa, Loic Martinez Normand, Universidad Politecnica de Madrid
Experiments Towards Robotic Learning by Imitation, by John Demiris, University of Edinburgh
Goal-Clobbering Avoidance in Non-Linear Planners, by Rujith de Silva, Carnegie Mellon University
3:30 – 5:10 PM Student Abstract Presentations Hall 6E, Washington State Convention & Trade Center
Dynamically Adjusting Categories to Accommodate Changing Contexts, by Mark Devaney and Ashwin Ram, Georgia Institute of Technology
Substructure Discovery Using Minimum Description Length Principle and Background Knowledge, by Surnjani Djoko, University of Texas at Arlington
Exploiting the Ordering of Observed Problem-Solving Steps for Knowledge Base Refinement: An Apprenticeship Approach, by Steven K. Donoho and David C. Wilkins, University of Illinois
Processing Pragmatics for Computer-Assisted Language Instruction, by Keiko Horiguchi, Carnegie Mellon University
Situated Agents Can Have Plans, by Mark Fasciano, University of Chicago
Introspective Reasoning in a Case-Based Planner, by Susan Fox and David Leake, Indiana University
A Statistical Method for Handling Unknown Words, by Alexander Franz, Carnegie Mellon University
Low Computation Vision-Based Navigation for a Martian Rover, by Andrew S. Gavin, Massachusetts Institute of Technology
Wednesday, August 3, 1994
10:30 AM – 12:10 PM Student Abstract Presentations Hall 6E, Washington State Convention & Trade Center
Tractable Anytime Temporal Constraint Propagation, by Louis J. Hoebel
Reasoning about What to Plan, by Richard Goodwin, Carnegie Mellon University
The Crystallographer’s Assistant, by Vanathi Gopalakrishnan, Daniel Hennessy, Bruce Buchanan and Devika Subramanian, University of Pittsburgh
Time-Critical Scheduling in Stochastic Domains, by Lloyd Greenwald and Thomas Dean, Brown University
Planning for Compotent-Based Configurations, by Gail Haddock, University of Texas at Arlington
The Epistemology of Physical System Modeling, by Kyungsook Han and Andrew Gelsey, Rutgers University
Testing a KBS Using a Conceptual Model, by Corinne Haouche, Diam Sim and Lamsade
A Dynamic Organization in Distributed Constraint Satisfaction, by Katsutoshi Hirayama, Seiji Yamada and Jun’ichi Toyoda, Osaka University
1:30 – 3:10 PM Student Abstract Presentations Hall 6E, Washington State Convention & Trade Center
Learning about Software Errors Via Systematic Experimentation, by Terrance Goan and Oren Etzioni, University of Washington
The KM/KnEd System: An Integrated Approach to Building Large-Scale Multifunctional Knowledge Bases, by Erik Eilerts, University of Texas
Generating Rhythms with Genetic Algorithms, by Damon Horowitz, MIT Media Laboratory
The Automated Mapping of Plans for Plan Recognition, by Marcus J. Huber, Edmund H. Durfee and Michael P. Wellman, The University of Michigan
Preliminary Studies in Agent Design in Simulated Environments, by Scott B. Hunter, Cornell University
Dempster-Shafer and Bayesian Network for CAD-Based Feature Extraction: A Comparative Investigation and Analysis, by Qiang Ji, Michael M. Marefat and Paul J. A. Lever, University of Arizona
Finding Multivariate Splits in Decision Trees Using Function Optimization, by George H. John, Stanford University
Learning Sorting Networks By Grammars, by Thomas E. Kammeyer and Richard K. Belew, University of California, San Diego
3:30 – 5:10 PM Student Abstract Presentations Hall 6E, Washington State Convention & Trade Center
The Formation of Coalitions among Self-Interested Agents, by Steven Ketchpel, Stanford University
Learning from Ambiguous Examples, by Stephen V. Kowalski, University of Southern California
Exploiting the Environment: Urban Navigation as a Case Study, by Nicholas Kushmerick, University of Washington
Quantitative Evaluation of the Exploration Strategies of a Mobile Robot, by David Lee and Michael Recce, University College London
Determination of Machine Condition Using Neural Networks, by John MacIntyre, Peter Smith and John Tait, University of Sunderland
When the Best Move Isn’t Optimal: Q-learning with Explorationl, by George H. John, Stanford University
Building a Parser that Can Afford to Interact with Semantics, by Kavi Mahesh, Georgia Institute of Technology
Using Errors to Create Piecewise Learnable Partitions, by Oded Maron, MIT Artificial Intelligence Lab
Thursday, August 4, 1994
8:30 – 10:10 AM Student Abstract Presentations Rooms 616–617, Washington State Convention & Trade Center
Everyday Reasoning Meets Geometry Theorem-Proving, by Thomas F. McDougal, University of Chicago
Development of an Intelligent Forensic System for Hair Analysis and Comparison, by C. Medina, L. Pratt and C. Ganesh, Colorado School of Mines
Model-Based Sensor Diagnosis: When Monitoring Should be Monitored, by Joel Milgram, Electricite De France
Theoretical and Experimental Studies of Temporal Constraint Satisfaction Problem, by Debasis Mitra, University of Southwestern Louisiana
A Theory of Reading, by Kenneth Moorman and Ashwin Ram, Georgia Institute of Technology
A Hybrid Parallel IDA Search, by Shubha S. Nerur, University of Texas at Arlington
Time-Situated Reasoning within Tight Deadlines and Realistic Space and Computation Bounds, by Madhura Nirkhe, University of Maryland
Integrating Induction & Instruction: Connectionist Advice Taking, by David C. Noelle and Garrison W. Cottrell, University of California, San Diego.
10:30 AM – 12:10 PM Student Abstract Presentations Rooms 616–617, Washington State Convention & Trade Center
A Comparison of Reinforcement Learning Methods for Automatic Guided Vehicle Scheduling, by DoKyeong Ok, Oregon State University
Making the Most of What You’ve Got: Using Models and Data to Improve Learning Rate and Prediction Accuracy, by Julio Ortega, Vanderbilt University
Learning Quality-Enhancing Control Knowledge, by M. Alicia Perez, Carnegie Mellon University
Database Learning for Software Agents, by Mike Perkowitz and Oren Etzioni, University of Washington
Diagnosing Multiple Interacting Defects with Combination Descriptions, by Nancy E. Reed, University of Minnesota
Building Emotional Characters for Interactive Drama, by W. Scott Reilly, Carnegie Mellon University
On the Computation of Point of View, by Warren Sack, MIT Media Laboratory
Coalition Formation Methods in Multi-Agent Environments, by Onn Shechory, Bar Ilan University
1:30 – 3:10 PM Student Abstract Presentations Rooms 616–617, Washington State Convention & Trade Center
Synthetic Robot Language Development, by Holly A. Yanco, MIT Artificial Intelligence Laboratory
Integrating Specialized Procedures in Proof Systems, by Vishal Sikka, Stanford University
Towards Situated Explanation, by Raja Sooriamurthi and David Leake, Indiana University
Reflective Reasoning and Learning, by Eleni Stroulia, Georgia Institute of Technology
Case-Based Reasoning for Weather Prediction, by C. Vasudevan, Florida Atlantic University
Agent Modeling Methods Using Limited Rationality, by Jose M. Vidal and Edmund H. Durfee, University of Michigan
Learning by Observation and Practice: A Framework for Automatic Acquisition of Planning Operators, by Xuemei Wang, Carnegie Mellon University
A Modular Visual Tracking System, by Mike Wessler, MIT Artificial Intelligence Laboratory
3:30 – 5:10 PM Student Abstract Presentations Rooms 616–617, Washington State Convention & Trade Center
Utility-Directed Planning, by Mike Williamson and Steve Hanks, University of Washington
Fuzzy Irrigation Decision Support System, by Hong Xiang, Brahm P. Verma, and Gerrit Hoogenboom, University of Georgia
Multi-Agent Learning in Non-Cooperative Domains, by Mahendra Sekaran and Sandip Sen, University of Tulsa
Computer Simulation of Statistics and Educational Measurement StatSim: An Intelligent Tutoring System for Statistics, by Liu Zhang and Donald Potter, University of Georgia
Video Program
1994 Video Program
The following videos were accepted for presentation at AAAI-94 by the video program committee. Complete abstracts are included in the Proceedings:
Guardian: A Prototype Intelligent Agent for Intensive-Care Monitoring, by Barbara Hayes-Roth, Serdar Uckun, and Jan Eric Larsson, KSL/Stanford University; David Gaba, Juliana Barr, and Jane Chien, Stanford University School of Medicine
Dynamic Generation of Complex Behavior, by Randolph M. Jones, University of Michigan
HIPAIR: Interactive Mechanism Analysis and Design Using Configuration Spaces, by Leo Joskowicz, IBM T.J. Watson Research Center and Elisha Sacks, Princeton University
ALIVE: Artificial Life Interactive Video Environment, by Pattie Maes, Trevor Darrell, Bruce Blumberg and Sandy Pentland, MIT Media Laboratory
A Reading Coach that Listens: (Edited Video Transcript), by Jack Mostow, Alex Hauptmann, Steven F. Roth, Matt Kane, Adam Swift, Lin Chase and Bob Weide, Carnegie Mellon Robotics Institute
Machine Rhythm, by David Rosenthal, International Media Research Foundation
Machine Translation Showcase
1994 Machine Translation Showcase
Exhibitor: Bedrich Chaloupka
Globalink
Bedrich Chaloupka / Cathy Behan
Globalink, Inc
9302 Lee Highway (Fourth Floor) Fairfax, VA 22031
703-273-5600
Globalink has developed PC-based bidirectional translation software for IBM and compatible computers for French-to/from-Spanish, Spanish to/from-English, German-to/from-English, Russion-to/from-English, and English-to-Chinese. The software is available for DOS, Windows, OS/2, UNIX, and Macintosh platforms. A PC-LAN version is scheduled for completion by Fall 1994. Other languages in development include Chinese-to-English, Italian-to/from-English, and German-to/from-French. By mid-1994, Globalink will also have its machine translation available on small handheld hardware devices.
The Globalink Translation General Dictionaries contain 60,000 entries, or canonical forms, which are capable of translating over 250,000 possible word forms. To account for phrase translation where all of the component words of a given phrase are in the dictionary individually, but in sequence represent a different semantic meaning, Globalink has developed a “Semantic Unit Dictionary,” including phrases of up to six words or 42 characters. The software also has the capability of utilizing Globalink’s subject-specific microdictionaries in addition to its own General Dictionary, or the user may create a separate microdictionary. Synonyms and alternative translation dictionaries also may be accessed through the dictionary or directly from the translation screens. In all dictionaries, entries allow multiple translations of a word based on part of speech. A great advantage of the system is its capability of disambiguating between these possibilities during the translation process.
Globalink’s translation technology has received special recognition for its quality and contribution to improved translation efficiency. The software received the 1993 DISCOVER Technological Innovation Award and recently received the WordPerfect Reader’s Choice Award.
Exhibitor: Alex Franz/Jaime Carbonell
KANT
Alex Franz/Jaime Carbonell
Carnegie Mellon University
Center for Machine Translation, Cyert Hall 224
Pittsburgh, PA 15213
412-268-7281
KANT is a machine translation system for highly accurate automatic translation of controlled source text into multiple target languages.It consists of a set of software modules that are the result of research and development in practical machine translation at the Center for Machine Translation (CMT) at Carnegie Mellon University. KANT is an interlingua-based translation system. It is designed for applications where technical information is created at a central location, and then translated for world-wide dissemination.
KANT achieves very high accuracy because it takes advantage of a controlled source language. The controlled source language allows a very large vocabulary, but places restrictions on the types of sentences and phrases that can be used. This eliminates vagueness and ambiguity in the source text, improving translatability and encouraging uniform, concise text in the source language. The set of constructions supported by KANT is more than expressive enough for technical information. In order to develop a new KANT application, some domain analysis and customization is required. The combination of products and document types to be translated are analyzed to extract the vocabulary (for the source lexicon), appropriate constructions (for the source grammar), and domain concepts (for the domain model). Previously translated target texts are also analyzed to produce corresponding lexicons and grammars for each of the desired target languages.
The Center for Machine Translation is currently building a large-scale KANT application for Caterpillar, Inc. When completed, this system will translate texts created in controlled technical English into eleven different languages with very high accuracy, covering the entire Caterpillar product line.
Exhibitor: Brigitte Orliac
Logos Semantic Table
Scott Bennett
Logos Corporation
200 Valley Road, Suite 400
Mt. Arlington, NJ 07856
201-398-8710
The successful and effective representation of semantic information has always been one of the biggest challenges facing MT developers. The Semantic Table is Logos unique solution to the problem. Designed to deal with the fact that meaning is often the function of a word’s association with other words, the Semantic Table is a collection of rules that enable the Translation System to establish the “meaningful” relationships among given sentence components. Once the semantic relationship between two or more constituents of a sentence has been recognized, the semantic rule gives instructions for the appropriate translation of the new-found expression. Because they operate at the deep structure level, the semantic rules can group and transform key sentence elements, unmindful of surface syntactic differences in the source language sentence. As can be expected, semantic rules are typically keyed-off verbs, but others exist also for adjectives, nouns, or any part of speech. Examples of the semantic features encoded in Logos representational language (also known as SAL or Seman to-Syntactic Abstraction Language) will be given. Examples of transformations of a given sentence elements in a variety of syntactic situations will also be provided. There are approximately 15,000 rules in the English to French semantic database today. The creation of new semantic rules is available to all users of the Logos Translation System through SEMANTHA, a unique tool in the realm of commercial MT systems. As a front-end utility to the translation engine, SEMANTHA allows users to identify the semantic relationships outlined above and specify the appropriate transformations prior to translation. A demonstration of SEMANTHA using rules selected from a variety of customer texts will therefore be given to conclude this presentation.
Logo Vista/Ambassador
Glenn Akers
Language Engineering Corp
385 Concord Avenue, Belmont, MA 02178
617-489-4000 x717
The LogoVista E to J English to Japanese Translation Support System is a syntactic transfer-based machine translation system with semantic processing that chooses the most likely translation in a given context. LogoVista E to J automates the translation of English text into Japanese, producing accurate drafts quickly and ensuring that terminology is used consistently. It can be used to translate a wide variety of documents, including product manuals, technical articles, and business correspondence.
The system features a set of dictionaries with more than 600,000 entries. The richly annotated System Dictionary contains more than 100,000 entries which cover the core vocabulary of English. Twenty-two optional Technical Dictionaries contain more than 500,000 specialized terms from business, science, and technology. Users can also create their own dictionaries.
LogoVista E to J can translate text both automatically and interactively (guided by the user). When used interactively, the system learns from the choices the user makes, stores this information in statistical form, and uses it to improve future translations. LogoVista E to J imports English text files in ASCII format and exports Japanese text files in Shift-JIS format for use with Japanese word processing and desktop publishing software. LogoVista E to J is available for the Macintosh, the Power Macintosh, and the Japanese Edition of Microsoft Windows.
Exhibitor: Lutz Graunitz
METAL
Lutz Graunitz
Sietec Open Systems
2235 Sheppard Avenue East, Suite 1800
Willowdale, Ontario M2J 5B5
416-496-8510/ 1-800-565-5650
METAL’s AI processor uses a rule-based expert system to perform a linguistic analysis of each translation unit. The standard XL unit is a complete sentence. Consequently the system is capable of performing a contextual analysis resulting in a more thorough and accurate draft translation than is possible with mere word substitution.
METAL is particularly well suited to high-volume draft translation of technical documentation of publication quality. METAL permits the addition of technical terms to the existing lexicon and also the creation of new subject-specific dictionaries, just as one may create a new sub-directory on a hard disk. Once technical terms have been coded, this one-time investment in lexicon enhancement will assure translator-independent consistency of translation over long periods of time and over a large variety of documents. The parameter file associated with a text prior to sending it to the batch queue of the translation processor will specify in which sequence dictionaries shall be consulted in order to achieve the best possible translation.
METAL uses existing DTP file (Interleaf, Framemaker, WinWord, WordPerfect, RTF, etc.), strips out the text, saves the format and text enhancement information, translates the text and subsequently merges the translated text with the format file, resulting in an output document in the same shape and format as the original, including placement of graphics and tables.
METAL requires a SUN SPARC IPX, SPARC2, or SPARC10 with a minimum of 32mb RAM and 475mb of hard disk space, and preferably 64mb and 1gb, respectively.
Exhibitor: Bob Frederking
PANGLOSS
Bob Frederking
Carnegie Mellon University
Center for Machine Translation, Cyert Hall 262
Pittsburgh, PA 15213
412-268-6656
PANGLOSS is a joint project of the Center for Machine Translation at Carnegie Mellon University (CMU), the Computing Research Laboratory of New Mexico State University, (CRL) and the Information Sciences Institute of the University of Southern California. (ISI)
The initial vision for PANGLOSS was to produce high-quality translations of restricted-domain newswire texts, using a knowledge-based inter-lingual design. Since high quality translation currently requires human assistance, the original goal was to design a human-aided machine translation (HAMT) system, where the level of quality would be high from the beginning, and progress would be measured by the decreasing amount of human interaction needed to produce the translations. The initial system handles Spanish to English translation in the domain of mergers and acquisitions, with plans to eventually add Japanese to English and an additional domain. NMSU has been primarily responsible for Spanish analysis, ISI for English generation, and CMU for system integration and the user interface: the Translator’s Workstation (TWS).
Largely in response to ARPA’s MT evaluation methodology, which emphasizes fully-automatic machine translation (FAMT) of unrestricted newswire text, the PANGLOSS project has developed a multi-engine approach. In addition to the knowledge-based MT (KBMT) engine, we employ a lexical transfer system and an example-based MT (EBMT) engine. These additions provide PANGLOSS with immediate broad but “shallow” coverage, while the knowledge-bases for the KBMT system are still under development. Current research centers on improving the individual engines, improving the output integration method, automatic selection of the best alternative for FAMT, interlingua theory, and Japanese analysis.
Exhibitor: Bonnie Dorr / Jye-hoon Lee
PRINCITRAN
Bonnie J. Dorr
Department of Computer Science
University of Maryland, A.V. Williams Building
College Park, MD 20742 301-405-6768
Dekang Lin
Department of Computer Science niversity of Manitoba, Winnipeg, Manitoba Canada, R3T 2N2
PRINCITRAN (Korean/English Machine Translation Research) is an experimental project for developing linguistically based syntactic and lexical-semantic representations for interlingual machine translation of Korean and English. Current research focuses on the development of an efficient broad-coverage principle-based parser for the English language based on a message passing paradigm; syntactic parameterization of the message-passing paradigm for parsing of Korean sentences; development of a Korean morphology analyzer and dictionary; and the construction of a large lexicon containing lexical-semantic representations for Korean and English verbs and nouns.
Our demonstration will present the grammatical formalisms and network representations used in our parser, processing of head-initial and head-final phenomena in a parameterized framework, and analysis of source language sentences into a lexical-semantic formalism that will ultimately serve as the interlingual input to a generator. The system currently runs in C++ and Lisp on a Sun.
Exhibitor: Marjorie Leon
SPANAM/ENGSPAN
Muriel Vasconcellos/Marjorie Leon
Pan American Health Organization
525 23rd St, NW, Room 629
Washington, DC 20037
202-861-4339
The PAHO machine translation systems feature ATN parsers of English and Spanish and context-sensitive analysis and transfer rules which are stored in the lexicon. They are production systems which together have been used to translate over 20 million words since 1980.
SPANAM and ENGSPAN are fully automatic MT systems, developed and maintained by computational linguists, translators, and systems programmers at the Pan American Health Organization (PAHO) in Washington, D.C. PAHO staff and free-lance translators postedit the MT output to produce high quality translations with a 30-50% gain in efficiency. The system is installed on a local area network and is also used by staff in several other technical and adminis trative units at PAHO Headquarters. Both the programs and the dictionaries are constantly being enhanced based on feedback from the users of the systems.
The software is written in C, and runs under MS-DOS. It is text-based with mouse support. Both systems use augmented transition network parsers; the network grammars are stored in data files which can be modified at runtime. Each of the MT dictionaries contains approximately 65,000 lexical items, phrases, analysis rules, and lexical transfer rules. The dictionary entries consist of up to 282 fields containing syntactic, semantic, and terminological information. The systems are designed so that the user can fine-tune the output of the translation program by adding different types of lexical entries and context-sensitive rules to the dictionaries.
Conference attendees are invited to bring English or Spanish texts in WordPerfect 5.1 or ASCII text files. Participants will be able to test the parser and modify the dictionaries. The systems are not available commercially, but PAHO is licensing them to a few public and non-profit institutions.
Exhibitor: Barbara Gawronska
SWETRA
Barbara Gawronska & Anders Nordner
Institute of Linguistics and Phonetics
Lund University, Helgonabacken 12
Lund 2362, Sweden
011-46-46-108440
SWETRA (Swedish Machine Translation Research) is an experimental Machine Translation project developed at the Department of Linguistics at the University of Lund, Sweden, directed by professor Bengt Sigurd and supported by the Swedish Council for Research in the Humanities and Social Sciences. The programs designed within Swetra are mainly aimed at solutions of theoretical linguistic problems. For the time being, the research concentrates on relations between parsing strategies and language typology; aspect choice and article choice in translation between Slavic and Germanic languages; translation of compounds and collocations; and domain-specific lexica and domain specific MT-strategies.
Our demonstration will comprise programs representing the research areas above. We plan to demonstrate two main grammatical formalisms used for parsing and generation of typologically different languages: Nexus Grammar (a kind of position grammar, suitable for Germanic languages) and Predicate Grammar (a valency-based formalism for processing so-called free-word-order languages). The formalisms as well as the transfer rules dealing with aspect and article choice are implemented as small toy programs in LPA MacProlog and Flex, translating linguistic examples between English, Swedish, Polish and Russian. Translation of compounds and collocations will be illustrated by means of several domain-oriented MT-systems: STOCKTRA (translation of stock market reports from Swedish and Russian into English), ABSTRA (translation of medical abstracts concerning asthma research from English into German and Polish) and KNITTRA (translation of knitting instructions from Danish into Swedish). In that context, we aim to discuss questions concerning domain-specific lexica and domain-specific syntax.
Exhibitor: Jeanne Homer
SYSTRAN
Denis A. Gachot
SYSTRAN Translation Systems, Inc.
7855 Fay Avenue, Suite 300
P.O. Box 907, La Jolla, CA 92037
619-459-6700
SYSTRAN Translation Systems, which celebrated its 25th anniversary last year, is a developer of patented, high-quality, fully-automatic natural language machine translation software. Eleven language pairs are used commercially: English into French, German, Spanish, Italian, Arabic, Portuguese and Dutch; and French, German, Spanish and Russian into English. Seventeen other language pair combinations are in various stages of development.
SYSTRAN parsers are robust, analyzing all sentences, even when incomplete or ill-formed. The parsers are largely deterministic, but uncertainties and errors are marked, leading to recursive analysis or alternate translation decisions later in processing. Program flow and basic algorithms of parsers are language-independent, serving languages as different as English, German, Japanese or Russian.
SYSTRAN’s transfer component performs limited parse restructuring and lexical selection and is the only component of SYSTRAN which is language-pair specific. The target language generation components are source language independent. Although rearrangement of the target output is language-specific, the basic architecture and strategy are similar for all languages.
SYSTRAN’s dictionaries consist of two major databases per source language: Stem Dictionary and Expression Dictionary (noun phrases and conditional expressions). Each of these is subdivided further, providing domain-specific meanings where appropriate. SYSTRAN’s dictionaries total over 1.3 million entries.
SYSTRAN has evolved from a direct, mainframe-bound system translating punched-card input to a modern transfer-type, PC-based product, handling formatted text from a variety of word processors. SYSTRAN has also expanded its capabilities to include data retrieval and commercial translation services. Future research endeavors include integration of OCR, speech synthesis, and speech understanding.
Exhibitors
Exhibitors
Booth # 100
The AAAI Press
445 Burgess Drive, Menlo Park, CA 94025
Tel (415) 328-3123 Fax (415) 321-4457
The AAAI Press publishes, (in many cases under joint imprint with The MIT Press) books on artificial intelligence. New titles include Massively Parallel Artificial Intelligence, edited by Kitano and Hendler, Proceedings of the Sixth Innovative Applications of Artificial Intelligence Conference, and Proceedings of the Second Conference on Artificial Intelligence Planning Systems, as well as new titles in the popular AAAI Technical Reports series.
Booth # 107
Ablex Publishing Corporation
355 Chestnut Street, Norwood, NJ 07648
Tel (201) 767-8450 Fax (201) 767-6717
ABLEX PUBLISHING CORPORATION, an academic book and journal publisher, offers its finest titles in the area of artificial intelligence. Among the many authors presented at this conference are Ben Shneiderman (Human-Computer Interaction series); Omid M. Omidvar (Progress in Neural Networks series); and George W. Zobrist (Progress in Computer-Aided VLSI Design series). So if these series interest you, come to booth #107 and take a look at the other great titles that Ablex has to offer. With Ablex, you can experience artificial intelligence like never before.
Booth # 117
Academia Book Exhibits
3925 Rust Hill Place, Fairfax, VA 22030
Tel (703) 691-1109 Fax (703) 691-2422
Academia displays professional books and journals at academic and professional congresses. Visit our booth to view publications from Academic Press, Cambridge University Press, Butterworth-Heinemann and Plenum Publishing.
Booth # 416
AcknoSoft
396 Shasta Drive, Palo Alto, CA 94306-4541
Tel (415) 856-8928 Fax (415) 858-1873
AcknoSoft’s KATE tools for induction and case-based reasoning has helped maintenance technicians diagnose jet engines, network operators analyze faults in telecommunication networks, biologists classify species, and bankers assess credit risks. In these and other applications, domain professionals have configured the system, modeled the cases, and accessed the hypermedia user interface without requiring knowledge engineers. There are four KATE tools, to build decision support systems from historical databases. Induction and case-based reasoning are used individually or in combination. The tools not only decide from experience but also show users the basis for these decisions. They complement statistical analysis, rule-based systems and information retrieval systems. Comparisons between the KATE-toolbox, statistical analysis and expert interviews have shown an application development time cut in half and a 16% increase in decision accuracy.
The KATE tools process complex data represented by objects, attributes and relations. Application programming interfaces (API) are also available to developers for customization and integration with legacy systems. The KATE tools currently run on Windows 3.1 PCs and on the Macintosh. They can access ORACLE, Sybase, Paradox, dBASE, Informix and DB/2 databases, and Excel or 1-2-3 spreadsheets. A UNIX version is under development.
Booth # 108
Addison-Wesley Publishing Company
One Jacob Way, Reading, MA 01867
Tel (617) 944-3700 Fax (617) 944-8964
Addison-Wesley is pleased to be exhibiting at AAAI–94. Please stop by our booth to see our new titles. Among them: two new titles by Patrick Winston; two new LaTeX titles, including a second edition of Leslie Lamport’s definitive text, which incorporates new LaTeX software; Simulating Neural Networks With Mathematica by James Freeman; and a selection of titles on multimedia computing.
Booth # 110
AI Expert Magazine
Miller Freeman, Inc.
600 Harrison Street, San Francisco, CA 94107
Tel (415) 905-2200 Fax (415) 905-4902
AI Expert focuses on how artificial intelligence technology is used in commercial applications. Written for AI professionals— software developers, technical managers, programmers, engineers and consultants— articles cover the latest technology and practical applications. Special supplementary issues published this year include the latest information on the hottest topics: quarterly issues of the Virtual Reality Special Report and AI in Finance. The Neural Network Special Report, the Neural Network Primer also available. Visit our booth for complimentary issues and subscription discounts.
Booth # 201
Axcélis, Inc.
4668 Eastern Avenue North
Seattle, WA 98103-6932
Tel (206) 632-0885 Fax (206) 632-3681
Axcélis will be showing the latest version EvolverTM, their complete genetic-algorithm (GA) software package for WindowsTM. GAs can solve a wide variety of complex problems in management, engineering, scheduling, resource allocation, and any optimization problems that involve many interacting variables. Evolver can also handle complex combinatorial, mixed integer and stochastic problems that traditional techniques cannot.
The $349 package includes six different GA engines, a seamless interface to Microsoft ExcelTM, a Visual Basic module, and a 200-page manual with GA theory and examples. Advanced users can call the Evolver engines from their own customized programs using documented Evolver API.
Booth # 116
Benjamin/Cummings
Publishing Company, Inc.
390 Bridge Parkway
Redwood City, CA 94065
Tel (415) 594-4400, extension. 738 Fax (415) 594-4444
This year, Benjamin/Cummings is introducing two new products at AAAI-94: a new edition of James Allen’s Natural Language Understanding, and a new text for undergraduate AI courses by Thomas Dean of Brown University entitled Artificial Intelligence: Theory And Practice.
Booth # 200
Cognitive Systems, Inc.
880 Canal Street
Stamford, CT 06902
Tel (203) 356-7756
Fax (203) 356-7760
CSI’s ReMind® application development system for case-based reasoning (CBR) is the most powerful and comprehensive tool for using induction and symbolic processing to get valuable information and decision-support automation from both textual and numeric data. ReMind has been used by more than 150 organizations on more than 50 different data-driven applications—from automated help desks to investment trading. On-going R&D projects have extended ReMind capabilities into areas such as temporal reasoning (for process control), data mining/intelligent agents and projective visualization (for multimedia/VR/edutainment). Demonstrations and information are available at the booth.
Booth # 115
Elsevier Science Publishing Company
655 Avenue of the Americas
New York, NY 10010-5107
Tel (212) 989-5800
Fax (212) 633-3764
Elsevier Science is publisher of the notable journal Artificial Intelligence. Sample copies will be available in our booth # 115. Other major journals are Artificial Intelligence in Medicine, Robotics and Autonomous Systems, Pattern Recognition Letters, Data and Knowledge Engineering and Neurocomputing. Please visit our booth to obtain a sample copy of any journal. Another good reason to visit our booth: we are offering a 20% discount on our books.
Booth # 305
EXSYS, Inc.
1720 Louisiana Boulevard NE, Suite 312
Albuquerque, NM 87110
Tel (505) 256-8356 Fax (505) 256-8359
EXSYS® Professional 4.0 Expert System Development Software: The EXSYS Professional expert system development package combines flexible power with ease of use for developing probabilistic, knowledge-based expert systems using IF-THEN-ELSE rules. Generic hooks allow invisible embedding and easy interfacing to other applications, databases and process control software, 6 confidence modes, including Fuzzy logic allows handling of uncertain data.
A command language provides control and flexibility using sub-sets, looping and conditional tests. Developers can customize screens and decide what options are available to end users. Automatic system validation tests for many types of logic errors and a variety of reports can be generated. Other features include Hypertext, linear programming, frames, security, unlimited runtime license, and linkable object modules. Platforms include: MS-Windows, Macintosh, Windows NT, UNIX, VAX, VMS, and MS-DOS with portability across platforms.
EXSYS RuleBookTMExpert System Development Software for MS-Windows or Macintosh: Expert systems are built using tree diagrams. The logic can be easily read by both developer and any other experts. When a new node is added, branches are automatically built for all possible input values. This automatically prompts the developer to consider all cases and guarantees complete systems. Expert systems are built by creating multiple trees representing independent aspects of a problem. Backward chaining and three modes of confidence are supported. A mouse click on a node brings up “Balloon help” windows that show rules associated with the branch.
A built in “expert” tests the entire system for a wide range of common development problems such as: incomplete branches, loop range errors, input which produces no conclusion and rules not used. Systems can be run from RuleBook. Tracing plus HOW and WHY commands allow for rapid development. Custom GUI screens, including multilevel hypertext help systems, can be added. A report generator allows conclusions to be printed. Finished applications may be distributed using the no-fee Runtime License program. RuleBook systems are upwardly compatible with EXSYS Professional.
Booth # 301
Franz Inc.
1995 University Avenue, Berkeley, CA 94704
Tel (510) 548-3600 Fax (510) 548-8253
Franz Inc.: The Leader in Dynamic OOP. This year at AAAI-94, Franz Inc. is featuring Allegro Store®, a high performance, production-ready object-oriented database management system for CLOS, which offers Allegro CL® users the power of persistent object-storage, and very fast retrieval and update of object data. AllegroStore® provides query processing and transaction-based operation and permits concurrent access of objects in a client/server environment. AllegroStore® also features standard database features such as detection, exception handling, referential integrity and inverse functions. Franz is also demonstrating new versions of Allegro CL 2.0 WindowsTM and Allegro CL 4.2, Allegro Composer® 2.0 and CLIMTM 2.0 for UNIX workstations.
Booth # 204
Gensym Corporation
125 Cambridge Park Drive, Cambridge, MA 02138
Tel (617) 547-2500 Fax (617) 547-1962
Gensym’s family of software products is built around G2®, a graphical, object-oriented environment for building and delivering intelligent real-time solutions for industrial, scientific, commercial, and government applications worldwide. Gensym’s software products help organizations easily and productively capture and deploy the expert knowledge of their most talented personnel in intelligent real-time systems that improve quality, increase reliability, and lower operating costs. Typical applications include process optimization, real-time quality management, supervisory control, advanced control using fuzzy logic and neural networks, process reengineering, and dynamic scheduling. Gensym supports its products worldwide through direct sales offices and a network of over 100 marketing partners.
Booth # 207/306
Harlequin Inc.
1 Cambridge Center, Cambridge, MA 02142
Tel (617) 374-2400 Fax (617) 252-6505
The Harlequin LispWorksTM Development Toolkit gives developers the tools necessary to develop sophisticated problem-solving applications and deliver them on various UNIX platforms as well as IBM-compatible PCs running MS Windows 3.1. In addition to the LispWorks programming environment, the Harlequin LispWorks Development Toolkit includes the KnowledgeWorksTM knowledge system development toolkit, and CLIMTM 2.0 high-level graphical toolkit.
LispWorks is a complete programming environment for the development of applications aimed at tackling large and difficult problems. It is built around Harlequin’s implementation of the Common Lisp language defined in version 2 of Common Lisp the Language.
LispWorks 3.2 enhancements include an enhanced foreign function interface (FFI), CLIMTM 2.0 support, extended database support, floating license server, enhanced multiprocessing and trace features as well as a new user interface.
LispWorks is currently being used by a variety of corporations and academic environments.
Booth # 404
ILOG, Inc.
2105 Landings Drive, Mountain View, CA 94043
Tel (415) 390-9000 Fax (415) 390-0946
ILOG will demonstrate its family of C++ software components including:
- ILOG SOLVERTM, the de facto standard for Constraint-Based Programming
- ILOG SCHEDULETM, a vertical library for building scheduling applications
- ILOG RULESTM, an embeddable rule-based programming library
- ILOG VIEWSTM, a graphics library for the development of Very Graphical User Interfaces (VGUI)
- ILOG BROKERTM, a tool for developing Distributed Object Computing applications
- ILOG SERVER, a tool for building dynamic servers C++ objects
- ILOG DB-LINKTM for connecting to standard RDBMSs
- ILOG KADS Tool, a cognitive CASE for the modeling of business activities.
Booth # 534
Intelligent Software Strategies
37 Broadway, Arlington, MA 02174-5539
Tel (617) 648-8702 Fax (617) 648-8707
Intelligent Software Strategies is a monthly newsletter for IS managers on intelligent software technologies and applications. Technologies covered include expert systems, KBS, CASE, OO, neural networks, natural language and other related technologies. Includes market assessments, technology and product reviews, and more. Published by Cutter Information Corporation, publishers of Object-Oriented Strategies, American Programmer, Application Development Strategies, and Ed Yourdon’s Guerrilla Programmer.
Booth # 409
International Association of Knowledge
Engineers (IAKE)
973D Russell Avenue, Gaithersburg, MD 20879
Tel (301) 948-3590 Fax (301) 926-4243
IAKE is a non-profit organization with individual, corporate and institutional members in some 35 countries. It provides general support internationally for the practice of knowledge engineering. Its conferences, seminars, technical journal, newsletters and other publications provide up-to-date practical information in the field. IAKE sponsors the Certification in Knowledge Engineering Exam. Booth Activities include: TECHTRAN—Live PC-generated demonstration of IAKE’s ES for knowledge-based technology transfer, with productivity measures and tradeoff analyses graphically presented; and IAKE TODAY—AV presentation covering the knowledge -engineering view of applied artificial intelligence.
Booth # 300
IS Robotics, Inc.
Twin City Office Center, Suite 6
22 McGrath Highway, Somerville, MA 02143
Tel (617) 629-0055 Fax (617) 629-0126
IS Robotics will be exhibiting their product line of small autonomous mobile robots, suitable for use in AI and robotics research. Using the behavioral algorithms originally developed at the MIT AI Lab by Rodney Brooks, the robots allow the dexterous control of a high number of degrees of freedom and the useful integration of large numbers of sensors, all accomplished using much less on-board computational power than more traditional control architectures. IS Robotics will be exhibiting several of its walking, wheeled and tracked robots, incorporating multiple sensorsystems.
Applied AI Systems, Ltd will be exhibiting a number of robot products, including upgrades to the IS Robotics robots to allow for vision based navigation, stereo vision, color vision, vision based landmark detection and navigation, and voice recognition/synthesis.
Booth # 111
Kluwer Academic Publishers
101 Phillip Drive, Norwell, MA 02061
Tel (617) 871-6600 Fax (617) 871-6528
Kluwer Academic Publishers is the leading publisher of research journals in the area of artificial intelligence. With over twenty journals devoted to this field of study, we are pleased to again be exhibiting at the National Conference on Artificial Intelligence.
We will have all of our pertinent journals on display. Stop by booth #111 and pick up a sample copy of: Machine Learning; Automated Software Engineering; Artificial Intelligence and the Law; The Journal of Mathematical Vision and Imaging; Artificial Intelligence Review or one of Kluwer’s other AI related journals. Find out about Autonomous Robots, Kluwer’s newest journal in this area.
Booth # 113
Lawrence Erlbaum Associates, Inc.
365 Broadway
Hillsdale, NJ 07642
Tel (201) 666-4110 Fax (201) 666-2394
LEA continues to produce superior books in AI with recently published titles such as A Symbolic and Connectionist Approach to Legal Information Retrieval by Daniel Rose and Inside Case-Based Explanation edited by Roger Schank et al. In cognitive science, recent titles include Grounds for Cognition by Radu Bogdan and Beliefs, Reasoning, and Decision Making: Psycho-Logic in Honor of Bob Abelson edited by Roger Schank and Ellen Langer.
Ground-breaking books in our new neural networks series include Proceedings of the 1993 and 1994 World Congress on Neural Networks edited by the INNS and Proceedings of the International Workshop on Applications of Neural Networks to Telecommunications edited by Joshua Alspector et al. Other new titles include Neural Network Computing for the Electric Power Industry: Proceedings of the 1992 INNS Summer Workshop edited by Dejan Sobajic, Active Perception edited by Yiannis Aloimonos, Decision-Analytic Intelligent Systems: Automated Explanation and Knowledge Acquisition by David Klein, and Adaptive Reasoning for Real-World Problems: A Schema-Based Approach by Roy Turner. Pick up samples of our journals, Human-Computer Interaction, The Journal Of The Learning Sciences and Machine-Mediated Learning.
Booth # 402
Man Machine Interfaces, Inc.
555 Broad Hollow Road, Suite 230,
Melville, NY 11747
Tel (516) 249-4700 Fax (516) 420-4085
MMI provides a complete line of genetic algorithm (GA) tools, applications and consulting services. GAs are ideal for difficult optimization and search tasks. Some of our products include:
1) EOS v2.0—an object-oriented genetic algorithm application framework. It allows programmers to build GA based applications in many languages (C/C++, Pascal, etc.).
2) The Genetic Object Designer—a MS Windows shell that allows users with no programming experience to quickly build GA based applications.
3) The Financial GENEius Tool Kit—an extension of EOS specialized for the creation of GA based
financial trading systems.
Booth # 200
Micro Data Base Systems, Inc. (mdbs)
1305 Cumberland Avenue
PO Box 2438, West Lafayette, IN 47906
Tel (800) 445-6327 toll free
(317) 463-7200 international
Fax (317) 448-6428
GURU is an expert system development environment and relational database management system that offers a wide variety of information processing tools, all seamlessly integrated into one program. Features such as a spreadsheet, business graphics, text processing, report generation, communications, a natural language interface, and more can be accessed at any time within GURU. It is fully compatible with SQL and offers a very powerful and flexible 4GL. GURU supports forward chaining, backward chaining, mixed chaining, multi-value variables, and fuzzy reasoning. It can also be easily used with KnowledgeMan.
Booth # 100
The MIT Press
55 Hayward Street
Cambridge, MA 02142
Tel (617) 253-5642
Fax (617) 253-5642
The MIT Press publishes books on computer science, artificial intelligence and cognitive science. New titles include Qualitative Reasoning: Modeling and Simulation with Incomplete Knowledge by Kuipers; Rules of Encounter: Designing Conventions for Automated Negotiation among Computers by Rosenschein and Zlotkin; Contemplating Minds: A Forum for Artificial Intelligence, edited by Clancey, Smoliar and Stefik; and from AAAI Press, Massively Parallel Artificial Intelligence, edited by Kitano and Hendler.
Booth # 101
Morgan Kaufmann Publishers, Inc.
340 Pine Street, Sixth Floor
San Francisco, CA 94104
Tel (415) 392-2665
Fax (415) 982-2665
In addition to Morgan Kaufmann’s impressive backlist of artificial intelligence titles, many important new and forthcoming AI books will be featured including: Artificial Intelligence Techniques in Prolog by Yoav Shoham, Intelligent Scheduling by Monte Zweben and Mark Fox and Essentials of Artificial Intelligence by Matt Ginsberg. Also featured will be a variety of conference proceedings including: The 13th International Joint Conference on AI, Advances in Neural Information Processing Systems-Volume 6, Uncertainty in AI-Tenth Conference, Machine Learning-Eleventh Conference, Principles of Knowledge Representation-Fourth Conference, and Proceedings of the First TIP-STER Workshop.
Booth # 317
PC AI Magazine
3310 West Bell Road, Suite 119
Phoenix, AZ 85023
Tel (602) 971-1869
Fax (602) 971-2321
PC AI Magazine is geared toward practical applications of intelligent systems. PC AI covers developments in expert systems, neural networks, object oriented development, and all other areas of artificial intelligence. Feature articles, software reviews, interviews, and book reviews present a wide range of AI topics in each issue.
Booth # 114
Prentice Hall
Simon & Schuster Education Group
2629 Redwing Road, Suite 260
Fort Collins, CO 80526
Tel (303) 226-5255
Fax (303) 226-5702
Prentice Hall is proud to announce a new AI and related subject book series with advisors Stuart Russell (UC Berkeley) and Peter Norvig (Sun Microsystems). Their innovative new book Artificial Intelligence: A Modern Approach, the first series book, is available in manuscript form for class use. Also available in our booth are Engineering Knowledge-Based Systems by Gonzales / Dankel, On Lisp: Advanced Techniques by P. Graham, and Elements of ML by J. Ullman. Corporate discounts for quantity purchases are available.
Booth # 105
Prime Time Freeware
370 Altair Way, No.150
Sunnyvale, CA 94086
Tel (408) 433-9662
Fax (408) 433-0727
Our new AI product, edited by Mark Kantrowitz, contains a five Gigabyte snapshot of the Carnegie Mellon University Artificial Intelligence Repository (AIR). The AIR is by far the largest and most complete collection of AI-related materials in the world. We are proud to have helped in the development of the AIR and happy that we can now deliver it to your desktop. We also have collections for TeX (two Gigabytes) and UNIX (five Gigabytes), and plug-and-play collections for SunOS and UnixWare. Prime Time Freeware (ptf@cfcl.com) publishes mixed-media (book / CD-ROM) collections of freely redistributable software, with $60 typical list prices.
Booth # 401
Production Systems Technologies, Inc.
5001 Baum Boulevard, Suite 419
Pittsburgh, PA 15213
Tel (412) 683-4000
Fax (412) 683-6347
Since its inception in 1983, Production Systems Technologies has had the world’s most advanced rule-based technology. Maintaining the company’s technological lead is management’s primary concern. Dr. Charles Forgy, founder and President of PST, developed RETE, the first efficient matching algorithm for rule-based systems. An enhanced algorithm, RETE II, and other proprietary implementation techniques, make PST’s rule-based tools, OPS/83 and RAL, extremely efficient. PST’s principal business activity is licensing OPS83 and RAL, and offering porting and consulting services to expert systems developers. PST customers include many of the world’s leading companies in manufacturing, telecommunications, defense, aerospace, utilities, automotive, and other industries.
Booth # 203
Quintus Corporation
301 B East Evelyn Avenue
Mountain View, CA 94041
Tel (415) 245-2851
Fax (415) 428-0211
Quintus Prolog is a complete Prolog development system, with extensive Prolog libraries. Quintus Prolog provides a graphical user interface, source-linked debugger, profiler, hypertext on-line help and interface to X Windows, along with user-customizable I/O memory management. Quintus Prolog supports development of stand-alone applications, as well as fully embeddable Prolog modules, which may be called as subroutines from other languages. There are no royalties on applications developed with Quintus Prolog. Quintus offers Prolog-based solutions for database, expert system, and GUI developers, through its OpenACE tool suite. Quintus also provides Prolog consulting and training. Platforms include most UNIX and PC workstations.
Booth # 417
Statute Technologies, Inc.
PO Box 772
Dickson ACT 2062
Australia
Tel (800) 229-1954 (US)
Fax (800) 299-1959 (US)
Tel +61-6-242-1982
Fax +61-6-242-1948
Statute Technologies, Inc. is a US subsidiary of SoftLaw Corporation, an Australian software services company that specializes in developing Windows productivity solutions. At AAAI-94, SoftLaw is presenting a paper titled “CCPS: Transforming Claims Processing Using STATUTE CORPORATE for Microsoft Windows.” The paper discusses our experiences in creating and successfully implementing a major Business Process Automation (BPA) application for a large Federal government department. CCPS is an administrative based AI production system that is operating successfully right now.
STATUTE CORPORATE is a state-of-the-art software package consisting of business logic modeling, administrative decision support, electronic text presentation and document generation tools for Windows. It is used for creating integrated BPA applications. Its successful implementation in CCPS proves that both STATUTE CORPORATE and Microsoft Windows are industrial strength utilities capable of true AI production systems. You are invited to attend our presentation and to come and meet us at the Statute Technologies booth to ask questions and to see CCPS for yourself.
Booth # 406
Talarian Corporation
444 Castro Street, Suite 140
Mountain View, CA 94041
Tel (415) 965-8050
Fax (415) 965-9077
Talarian Corporation develops and markets RT-works®, a high performance client/server software architecture designed specifically for intelligent monitoring and control of complex computerized systems.
Talarian Corporation provides capabilities that increase the productivity and timeliness of the software development process. The RTworks environment is specifically designed and implemented to allow customers to focus on the functionality of their application and greatly reduces the programming effort needed for development and support of time-critical systems. The RT-works environment incorporates a modular, client server, object-oriented approach that supports incremental growth and implementation. RTworks facilitates integration with existing systems through open standards on multiple platforms.
Booth # 214
Triodyne, Inc.
5950 West Touhy Avenue
Nilies, IL 60714
Tel (708) 677-4730
Fax (708) 647-2047
The U.S. Department of Energy’s (DOE) Office of Technology Development (OTD) is responsible for managing an aggressive national program of applied research, development, demonstration, testing, and evaluation (RDDT&E) for environmental cleanup, waste management, related technologies. In many cases, the development of new technology presents the best hope for ensuring a substantive reduction in risk to the environment and improved worker / public safety within realistic financial constraints.
Booth # 400
University of Washington
Computer Science & Engineering, FR-35
Seattle, WA 98195
Tel (206) 543-9196
Fax (206) 543-2969
The University of Washington has top-ranked graduate and undergraduate programs in Artificial Intelligence. Six faculty members lead research projects in agent architecture, planning (case-based, temporal, probabilistic, decision theoretic, contingent, and with incomplete information), engineering problem solving (model-based and qualitative reasoning), machine learning (inductive, explanation-based and speedup learning), reasoning under uncertainty (efficient Bayesian inference and probabilistic planning), AI testbeds, software agents (the Internet Softbot), computer vision, image processing, and natural language. The Department is fully equipped with the latest workstation and networking technology, and its friendly atmosphere supports collaboration with top researchers in computer graphics, theory, VLSI, and systems. The coffee can’t be beat.
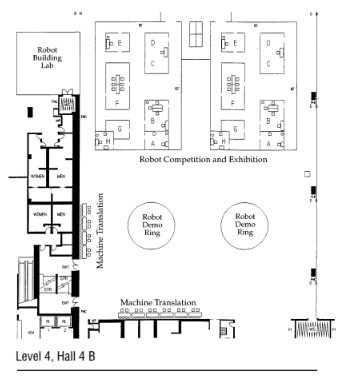
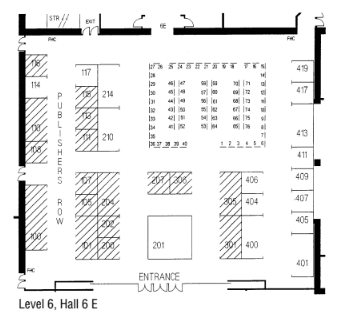
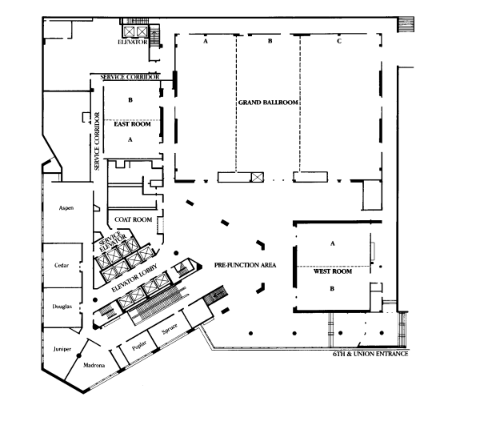
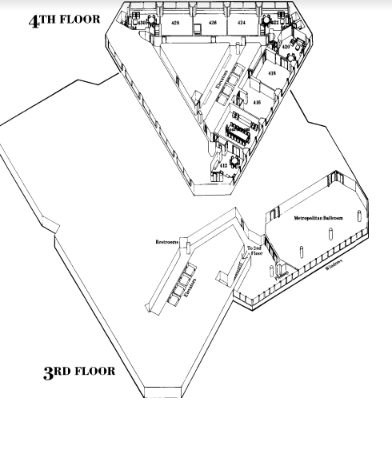
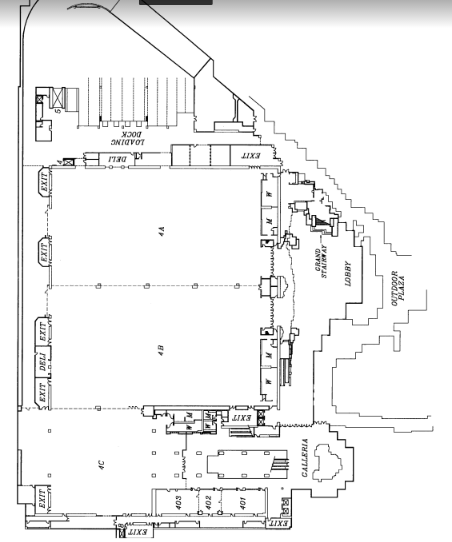
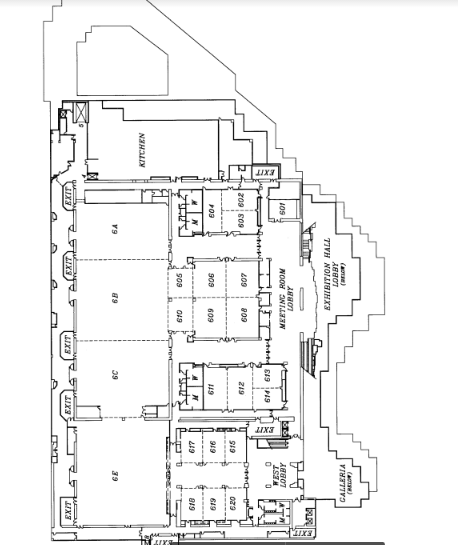
Robot Competition
The 1994 AAAI Mobile Robot
Competition & Exhibition
Contest Rules
(Latest version at time of print. Please note that these rules are preliminary and are subject to change, especially in Scoring.)
General
The overriding principle behind the rules for this year’s contest is the desire to move towards more realistic tasks in a more realistic environment, in particular an office environment.
The contest will consist of two events, one emphasizing navigation, and the other emphasizing the integration of navigation, perception, and manipulation. Both events will take place in the same simulated office environment, similar to that used in the “office delivery” task in the 1993 competition. We anticipate the layout to be similar to a real office environment, with straight hallways, rooms at semi-regular intervals, and more realistic obstacles including real furniture, trash cans, stacks of paper, and so forth. Doorways will be the size of a typical office door (80-120 cm), although there will probably not actually be doors. As a special concession to teams with large robots, the doorways may be widened to no more than 1.5 robot diameters.
Sensory markers and and a priori metric maps may be used at the cost of some points. (See the section on scoring, below.) Teams are encouraged to contact the rules committee in advance to discuss any sensory marker technology they plan to employ.
Virtual sensors that rely on the robot possessing some a-priori information about the environment that would not normally be available, or where a human provides information to the robot during a run, will not be allowed. All entries must be fully autonomous, although robots which do not use the contest-supplied topological map can give their robots labels for rooms so that the robot-generated map corresponds to the contest generated map. These can only be given once during all of the runs.
Virtual manipulation (for example, having the robot ask someone to place a nearby object on top of it) is allowed but will incur a scoring penalty.
Event 1: Office Delivery
This event consists of navigating to a goal location. The robots will be started in one room of the arena and must move to a goal room. Robots will start at an arbitrary location and orientation within the start room. Robots must navigate to the designated destination and indicate completion in some unambiguous way. To a limited extent, obstacles may move between runs, and doorways may open and close.
Contestants will be given a topological map of the office environment by the contest organizers shortly after it is set up (about a day or so before the competition begins). The topological map will have nodes representing each room, intersections of rooms and hallways, intersections of hallways and foyers. The topological map will show connections between nodes. The topological map will also show directions to neighboring nodes, which can be assumed to be accurate to within ten degrees. The topological map will not give distances between nodes. Immediately before their competition run, contestants will be told at which node they are starting and which node is the goal. Doors can open and close, effectively breaking connections that appear in the original topological map. The original map will show all possible connections, but not necessarily all connections available during the competition run. Doors that are closed will be indented from the walls by approximately 10 cm, which is normal for closed office doors. Each robot will have three runs, with the best two scores counting towards the final score for the event. Information gathered by the robot in one run may be retained in subsequent runs, and also in Event 2. Thus, robots can use their first run to construct a metric map of the environment if they so desire (in fact, this is encouraged).
Event 2: Clean Up The Office
In this event there will be a number of small objects scattered throughout the environment which the robot must locate and move to a designated receptacle. There will be three different types of objects: styrofoam coffee cups, aluminum soda cans, and crumpled wads of paper. The receptacles will be standard office trash cans (metal and circular, standing about 0.3 m high and about 0.3 m in diameter, slightly tapered towards the bottom); no other object in the environment will have the same dimensions as the trash cans. There will be a few dozen objects scattered throughout the environment and an ample number of trash cans. Most of the trash will be on the floor but there may also be objects on desks, chairs, and shelves. The cups and cans will be upright (unless some team specifically asks to demonstrate the ability to locate and retrieve objects lying on their side.) In order to discourage brute-force mechanical solutions, a robot may not carry more than three objects at one time.
Scoring
(Likely to change by time of competition):
A robot’s score for each run is its base score minus any penalties incurred. The base score for event 1 is 100-t/10 where t is the robot’s time in seconds. The base score for event 2 is the number of objects collected within some time limit (probably about 20 minutes) times 20.
Penalties:
Sensory Markers:
- Name tags by the doorways: 1 point
- Passive sensory markers (for example, bar codes): 1 point each
- Reflective sensory markers: 2 points each
- Active beacons: 5 points each
- (Sensory markers which are visible from more than one room by looking over the walls (as opposed to looking through an open doorway) incur the same penalty as if there were a separate marker in each room where the marker is visible, for example, a marker visible from three rooms is penalized as if it were three markers.)
A priori Information:
- A complete, accurate map of the environment: 20 points
- Initial location: 10 points
- Initial orientation: 5 points
- Contest-supplied topological map: 5 points Environmental Modifications:
- Sonar skirting: 10 points
- Doorway widening (large robots only): 5 points
- Marking objects in event 2:
– 20 points for passive markings (such as painting them a distinctive color)
– 50 points for active markings (such as putting magnets inside)
- Non-contest supplied trash cans: 20 points
- Non-contest supplied trash: 20 points
Other Penalties:
- Virtual manipulation: 15 points
- Collision with an obstacle: 10 points per collision, may be more for high-speed collisions at judges’ discretion
- Collision with a human: Disqualification (Judges may override this in exceptional circumstances, such as if a human intentionally steps in a robot’s way.)
Bonuses (At Judge’s Discretion):
- Communication (from the robot to the audience): Up to 10 points
- Elegant, clever solutions or exceptionally graceful robots: Up to 20 points
- Note 1: Teams that attempt real manipulation in Event 2 and fail (i.e., they move to the object, reach for it but don’t grasp it) can receive points for that object, but will be penalize for virtual manipulation, at the judge’s discretion.
- Note 2: Teams that choose not to use the contest-supplied topological map, may indicate to their robots the correct label for each room. The robot must ask for this label and providing the label cannot serve as an indication that the robot has entered a room. The purpose is to allow robots that can build their own maps to establish a correspondence between their maps and the contest-supplied maps. These labels can be supplied only once per room during all runs.
Competitors
AIRS
University of Maryland
Team Advisors: Professor James Hendler, Dr. David Musliner
Team Leader: Glen Henshaw, Irving Hsu, Oliver Seeliger, Karen Bottom, Phineas Smith
We are beginning an exploration of frictionless motion using a unique robot called the Airborne Imaging Robotic System (AIRS). The AIRS robot uses an air-cushion (hovercraftlike) base with an air-thruster maneuvering system and supporting electrical and electronic components. Air-cushion vehicles have a very low friction coefficient, so they move and respond to outside forces in a way that simulates the frictionless motion of a space robot.
Design of the AIRS platform began in December 1991 at Brigham Young University. The basic system was completed in February 1993. AIRS was partially financed by the BYU Honors Department with private sources providing the balance of funds. Ultimate Support Systems, Contech, and Signetics were corporate sponsors. Dr. William Barrett of the BYU Computer Science Department advised the project. AIRS is now at the Autonomous Mobile Robotics Laboratory at the University of Maryland, and is being used for this project.
AIRS is an autonomous air-cushion (hovercraft) vehicle designed as a platform for research into the control of spacefaring robots. Such robots have control problems that are quite different from traditional wheeled robots or walking machines. At the AAAI robotics contest, we intend to demonstrate the ability to control a low-friction robot in a very confined environment. This type of problem would be encountered in robotic shipwreck exploration or the design of a small interior or exterior service robot for the space station.
For this contest, we have outfitted AIRS with omnidirectional ultrasonic rangefinders for wall detection and sensors for obstacle avoidance. We have also added an onboard main computer and several subprocessors for sensor preprocessing and low-level hardware control. Finally, we have written software that continually monitors AIRS’s angular and translational motion, and estimates and controls its state vector. We are currently working to find and integrate a camera system to provide visual support for the task (probably using only simple algorithms for tasks such as corner detections or specific shape recognizers).
Amadaus
Worcester Polytechnic Institute
Advisor: Dr. R. James Duckworth
Team: Tyson D. Sawyer
Amadaus is a RWI B21 mobile robot system, color vision, sonar, IR, tactile. Low-level control is accomplished with simple reactive behaviors. In some cases, especially for higher level control, raw sensor data is manipulated to produce the effect of a virtual sensor. A virtual hallway intersection detector uses information from an occupancy map created with sonar data as well as IR and visual clues.
Navigation is based on detecting landmarks and comparing the relative locations and characteristics of the landmarks discovered with those in a database. In the case of operation in new territory, no match will be found in the database with the landmarks discovered, so the landmarks will be entered in the database for future use. The methods are very tolerant of missing landmarks due to blocked view or unreliable sensor data. It is also tolerant of changes in the environment and will modify its database as the environment changes.
ARGUS
Lockheed Missiles and Space Company
Research and Development Division
Advisors: Pete Berardo, Robotics and Automation Group and Raj Doshi, Lockheed Artificial Intelligence
Center
Team Leader: David Hinkle, Lockheed Artificial Intelligence Center
Members: Ken Jung, Lockheed Artificial Intelligence Center and Daniela Musto, National Research Council of Italy
Argus is an autonomous mobile platform used for research in autonomous robotics, including high-level perception, mission planning, replanning, and reasoning with uncertainty. Research efforts include using hierarchical plan structures and decision theoretic principles to guide value-based replanning.
Argus is a Nomad 200 from Nomadic Technologies (Mountain View, CA). It is equipped with 16 sonar sensors, 16 infrared sensors, two bumper ring sensors, and a 2D structured-light range finder. Computation is provided by an on-board UNIX workstation.
CHIP
University of Chicago
Advisors: Jim Firby and Michael Swain
Team: Peter Prokopowicz, Sean Engleson, Roger Kahn, Alain Roy, Josh Flachsbart
Chip is roughly cylindrical with a diameter of about 18 inches and a height of about 3 feet. It rides on an RWI B12 base and is equipped with 8 sonar range sensors good to about 12 feet and 16 I/R range sensors good to about 3 feet. The robot is also equipped with a simple Hero II arm, which can reach the floor. Sitting on top of the robot are stereo color cameras on an independent pan/tilt head. The images from these cameras are broadcast off the robot by radio to a Sun SparcStation equipped with a DataCube MV200 image processing board. All motors and sensors on the robot are managed by on-board microcontrollers that communicate with a Macintosh computer off the robot using a 9600 baud radio modem. Robot control is spread across the on-board microcontrollers, the Macintosh, and the SparcStation.
Chip is the mobile robot testbed for the University of Chicago Animate Agent Project and will be using the software architecture developed for that project during the competition. At the bottom level of the architecture, action and vision routines are organized into a modular control system. These routines are enabled and disabled in different combinations to alter the robot’s basic behavior to follow corridors, squeeze through doors, and cross foyers. The set of active routines is managed by the RAP reactive execution system in a flexible, goal-directed fashion.
In both events 1 and 2, Chip will be using local navigation routines based on sonar and IR sensor readings and algorithms for obstacle avoidance patterned after potential-field techniques. These will be broken down into routines for following walls and hallways, turning corners, finding and passing through doors, and orienting with respect to specific objects. Chip will also be using its color vision capabilities for finding door labels, its stereo vision for detecting open doors and obstacles, and pattern recognition algorithms for finding trash and trash cans based on shape, color and texture cues. These capabilities have been efficiently implemented on the Datacube/Sun hardware so that they can be tightly integrated with the actions of the robot; one cycle of these algorithms typically takes less than a second.
CLEMENTINE
Colorado School of Mines
Advisors: Robin Murphy, Julian Martinez
Team: Interdisciplinary Undergraduate Robotics Team: Jeff Almen, Tracy Desmond, Val Gough, Paul Graham, Dale Hawkins, Floyd Henning, Kevin Hicks, Sheri Jetter, Dave Kuhlman, Brian McCullough, Scott Nagel, Paul Wiebe, Brian Vigil
The CSM Interdisciplinary Undergraduate
Robotics Team will be fielding Clementine, a customized Denning MRV3 mobile robot used for research and education in the Mobile Robotics/Machine Perception Laboratory. Clementine is controlled by an onboard Sun Sparc IPX and is equipped with sonar, two video cameras, laser navigation, and audio. She uses a general purpose hybrid deliberative/reactive software architecture, which is also on Lucy, the CSM/Omnitech Robotics Graduate Robotics Team’s entry in the 1994 Unmanned Ground Vehicle Competition. The reactive component of the architecture sums active strategic behaviors (move-to-goal, move-thru-door) to produce a desired motion. The safest means of accomplishing that motion is computed by tactical behaviors; these include the VFH obstacle avoidance algorithm and a fuzzy speed controller which adapts the speed according to the amount of clutter or uncertainty in her surroundings.
Cubit, a Light-Weight, Autonomous Robot
University of New Mexico
Team Leader: Stephen Elliott
Team Members: Dominic Esquibel, Donald Maxwell, Richard McCracken, Christopher Medcalf, Simon Mehalek, Frank Mercer, “Spanky” Rick Speis, Patrick Valdez, Rodney Ward
The UNM entry is Cubit, an autonomous robot. The technology used is straight-forward. There will be a PC-compatible motherboard interfacing to sonar units and a microcontroller-based motor control unit. These sensors and computing units should allow the robot to satisfy the requirements of the first part of the competition, navigation between several rooms.
If time allows, the UNM team will extend the project so that the robot may complete the second part of the competition. If extended, a PC digitizing card will be built using an 8255 PIC and an analog to digital converter, providing that a video camera can be obtained.
The sonar unit will be built using sonar transducers and a simple PC interface (using the PC bus). The PC microprocessor will generate the signals to drive the sonar unit. If this proves problematic, a separate 8031AH-based speaker driver will be built that will measure distances throughout the room.
Fuzzy logic concepts will be used to translate the ascii-represented desired destination into directions for the robot. An internal, higher-resolution map in the PC’s memory will be used to derive instructions for the robot, including move forward, move back, turn left, and turn right. Since the robot is operating well below the limits where complicated kinematic effects occur, a 286-based PC should have enough computing power. However, a 486SLC-based motherboard will be obtained, and it will direct the robot.
CUJO
Simon Fraser University
Team Leader: Craig Woods
Team: Bill Lye, Charles Howes, Dave Lee, Richard Walters, Lisa Patterson, Rob Johnson, John Harvey, Sean Puttergill
‘CUJO’ is a small wheeled robot built from entirely from scratch (including the chassis and all processing cards) as an undergraduate student project. The architecture is distributed, with dedicated processors for each of the sensors and a central ‘brain’ based on an Intel 80186. Sensors include sonar, laser, and b/w vision.
We are developing two approaches to Event 1. The first has been dubbed the “Rubber Band” method. Implemented within a black board architecture, it abstracts the boundaries of obstacles and travelable space as a thin flexible border or rubber band. The rubber band will be manipulated by several agents— small independent modules within a blackboard—to increase the accuracy and functionality of the rubber band while simultaneously ensuring the computational requirements of further operations remain within the realm of the limited embedded processor. The rubber band can be transformed into a directed graph to be used by traditional artificial intelligence reasoning.
The second approach uses a behavior based configuration. Competing and cooperating behaviors will form a high-level control mechanism which utilizes virtual sensors and actuators. Mapping is performed on both local (single room/hallway) and global scales. Local mapping of obstacle boundaries and objects is performed by a virtual sensor as the robot moves within the local environment. As certain behaviors provide the robot with a tendency to explore, the map will be automatically built and updated. On a global scale, a linkage map defines the connections between rooms and hallways, and tracks overall position.
Dervish
Stanford University
Team Members: David Andre, Stan Birchfield, Jason Campbell, Matt Gloier, Viraj Khanna, Illah Nourbakhsh, Rob Powers
Dervish is a modified Nomad-100 mobile robot used to develop reliable, real-world algorithms for motion planning, control, and sensing. Its 16 sonar sensors have been reconfigured in a non- traditional manner in order to provide more effective sensing of the environment. All sensing is accomplished by these sonars.
Low-level sensing and motor control is performed by dedicated processors, while two Macintosh Powerbooks are utilized to achieve higher-level planning and reasoning.
Egor
University of Utah
Advisor: Tom Henderson
Team: Larkin Veigel, Larry Schenkat, Peter Pike-Sloan, Alyosha Efros, Ron Leak
Egor is a TRC Labmate with 24 sonars as primary sensors, 8 IR’s, 1 camera. DFI Docking Station and Notebook (Intel 486-DX33). It runs with no umbilical, and needs overnight recharge. Our team is using the logical sensors methodology for organizing sensing and sensing related computation; this is an object-oriented abstraction approach that also offers error detection and fault recovery mechanisms. It is based on logical behaviors (move-along-hall, get-out-of-room, etc.), as well as obstacle avoidance reactive behaviors. The high-level planning for room-to-room navigation will either be a pre-compiled next-move-to-goal lookup table or a best path earch for the given problem instance.
ERRATIC
Artificial Intelligence Center
SRI International
Team: Kurt Konolige
Erratic is an autonomous mobile robot used for research in control, planning, sensing, and acting. It is equipped with sonar sensors. Computation is supplied by an MIT 6.270 microcontroller board and an offboard Macintosh. Erratic duplicates most of Flakey’s functional abilities, at a low cost (under $1000).
Erratic’s control software is built on modules called control structures, which incorporate a set of fuzzy rules designed to reliably achieve a particular goal in a specified context. Multiple control structures operate in parallel, and are coordinated by a task-level planner. Erratic integrates several diverse methods of acquiring and interpreting sensor data, including an occupancy grid for local obstacle avoidance based on sonars, and 2D recognition routines for landmark acquisition and tracking.
4 Blizzards
Georgia Institute of Technology
Advisor: Dr. Ronald C. Arkin
Team Leader: Tucker Balch
Team Members: Doug MacKenzie, Gary Boone, Tom Collins, Juan Carlos Santamaria, David Huggins, Erik Blasch, Ray Hsu, Harold Forbes
Custom-built tracked vehicles controlled by a ‘386 motherboard and a 68332 Business Card Computer. Equipped with vision, grappling hand and tactile sensors. We are custom-building our own small robots this year. Our approach will use up to four small, X inexpensive robots operating in parallel to accomplish the contest tasks. Each robot has two on-board computers: a 80386-based PC with a floppy disk drive and vision card for high-level control and vision processing, and a 68332 for motor control and low-level sensing. Obstacles will be detected with contact switches or IR soft-bumbers, while coke cans, trash, and trash cans will be found using vision. We will use multiagent motor schema behaviors with a finite state automoton for temporal sequencing to accomplish the subgoals of the contest tasks.
Hotblack
Seattle Robotics Club
Team: Karl Lunt, Bothell, Washington
Hotblack is a home-brew 68hc11-based machine. Sensors will include IR object detectors, bumper switches, and (possibly) sonar. Navigation algorithms still under construction, as is the robot itself. Working code will be written in a custom dialect of Forth, and in 68hc11 assembly language.
Rhino
University of Bonn, Germany
Team members: A.Cremers, J.Buhmann, W.Burgard, D.Fox, T. Hofmann, F.Schneider, J.Strikos, S.Thrun, B.Trouvain
Rhino is a RWI B-21 mobile robot platform, equipped with 24 sonar sensors and a dual camera system. Rhino employs a distributed control system, which integrates reactive behaviors and map-based navigation. A special emphasis will be on demonstrating on-line learning algorithms for navigation and object recognition. Most of the sensor processing will be done on local 486 computers. Rhino has been entered in collaboration with RWI Inc.
Space-Com
Team: The Androids
Project Engineer: Simon Peter Mehalek
Space-Com has a three wheeled robotic base engineered at Carnegie Mellon University. Space-Com was modeled after CMU’s Neptune Robot. Space-Com is a fully autonomous robotic vehicle obtaining its information from a variety of sensors in a specially designed laser imaging system. It provides relative data on the environment and allows the computer systems to set up a coordinate system for dead reckoning relative to obstacles. The navigation system employs local directional sonar. This is used for quick path planning, and further serves to alert the robot to the proximity of obstacles. Several on board computer systems are used to control basic functions, and all the main processing and video analysis is done at a ground based Dec Alpha system running at 200 Mhz. The Alpha is hooked up to a spread spectrum radio modem that relays commands to Space-Com. All computer subsystems on Space-Com are linked to a low power 486 computer system vial high speed serial links. The 486 acts as a hierarchal command processor. Each computer subsystem has a certain priority level. The 486 interprets the information and communicates via Hi speed Ethernet over the spread spectrum radio modem.
The alpha does local processing and basic path planning; mean while, a super computer at Los Alamos National labs is mapping the terrain and a neural network of 32000 processors on a Thinking machines CM 5 the CM 5 communicates via the telcom communication satellite back to earth to a bi-directional radio tracking dish. This dish will be placed outside at the competition and a ethernet cable will run into the dec alpha station.
The software is written in Cisel, a parallel processing language. On the alpha, the code is in C. Other artificial intelligence software is used but its performance has not yet been tested. CCD color video will be used as an aid for locating objects and navigation.
Xavier
Carnegie Mellon University
Advisor: Reid Simmons
Team: Hank Wan (deceased), Joseph O’Sullivan, Jim Blythe, Garrett Pelton, Richard Goodwin, Thomas Mathies, Deepak Bapna
Xavier is built on an RWI B24 base. Sensors include bump panels, a 24-element sonar ring, Nomadics laser light striper, and a color camera mounted on a pan/tilt head. On-board computation consists of two i486 computers and a laptop, connected to each other by Ethernet. The robot communicates with humans using both graphics and speech generation and recognition. Xavier uses a distributed, concurrent software system, written in C and running under the Mach operating system. The Task Control Architecture is used for inter-process communication, for sequencing and synchronizing tasks, and for execution monitoring and exception handling.
Xavier uses the sonar and laser sensors to perform local obstacle avoidance. This is currently done using a modified potential field algorithm, but that may change by the time of the competition. Corridor navigation uses a landmark-based approach, with the landmarks being detected using an evidence grid which incorporates sonar and laser data. Xavier plans paths using a topological map augmented with metric information, and then generates a series of landmarks (go to the next intersection) for the corridor navigation subtask. When Xavier determines that it is lost (which happens more often than we like), it explores its environment trying to match observed landmarks with those expected based on the map. In fact, Xavier employs a wide variety of monitoring and exception handling behaviors to augment its deliberative path plans. In this way, Xavier can reliably handle complex office environments, and deal with unexpected changes in the environment, like blocked passageways.
To find trash and trashbins, Xavier will use vision-based techniques. The plan is to have Xavier learn to recognize these objects using inductive learning techniques. In this way, we will be able to handle whatever type of trash is chosen for the competition. Xavier will use decision-theoretic planning techniques to determine the optimal areas to explore for finding trash and trashbins. There is a small possibility that we will actually have a manipulator installed at that time, so that we can actually collect the trash.
Robot Exhibitors
Colorado School of Mines
Interdisciplinary Undergraduate Robotics Team: Jeff Almen, Tracy Desmond, Val Gough, Paul Graham, Dale Hawkins, Floyd Henning, Kevin Hicks, Sheri Jetter, Dave Kuhlman, Brian McCullough, Scott Nagel, Paul Wiebe, Brian Vigil Advisors: Robin Murphy, Julian Martinez The Colorado School of Mines Mobile Robotics/Machine Perception Laboratory will demonstrate two ongoing research efforts in mobile robotics and sensing.
The CSM Hybrid Deliberative/Reactive Architecture uses a hybrid architecture for both the AAAI competition on Clementine, a Denning MRV 3 research platform, and Lucy, an Ackerman steered vehicle on loan from Omnitech Robotics, which is being used for the 1994 Unmanned Ground Vehicle competition. The hybrid architecture, written in C++, is generic and used to control both Clementine and Lucy.
This demonstration will feature Lucy performing the tasks for the unmanned ground vehicle competition: following a road delimited by a hite line using computer vision and avoiding obstacles without leaving the road.
Novel aspects of the system are its ability to improve its path and speed control between runs; integration of knowledge of previous runs into a reactive system; and division of behaviors into strategic and tactical behaviors, permitting the combination of both potential field representations and machine dependent behaviors.
The “Lassie, get the sheriff” behavior will demonstrate on Clementine acting like Lassie. First she finds a human (a virtual Timmie) and asks him to play. If Timmie says ”yes” (waves), then she follows Timmie until he quits moving and barks. If there’s no movement, then Clementine must go for help (finds a human). Clementine goes to places where she has seen people in the past but still opportunistically looks for a human.
The Lassie behavior can be used for a support robot, following a fireman or rescue worker into a hazardous area carrying heavy equipment, and keeping an eye out for the worker. This behavior demonstrates semantic-based search such as used by foraging animals. It makes use of our architecture’s multi-level map which allows locations to be labeled and reasoned over. It also demonstrates multiresolution motion detection and tracking using a vision system developed by Fortesque and integration of reactive behaviors into a more complex behavior that must adapt over time.
The Dynamite Testbed
(Soccer-Playing Robots)
University of British Columbia
Team: Michael Sahota, Stewart Kingdon, Alan Mackworth, and Rod Barman
A facility called the Dynamite testbed has been designed to provide a practical platform for testing theories in the soccer domain using multiple mobile robots. It consists of a fleet of radio controlled vehicles that perceive the world through a shared perceptual system. In an integrated environment with dataflow and MIMD computers, vision programs can monitor the position and orientation of each robot while planning and control programs can generate and send out motor commands. This approach allows umbilical-free behavior and very rapid, lightweight fully autonomous robots.
Several controllers have been implemented to allow robots to compete in one-on-one games of soccer. Current functionality includes various simple offensive and defensive strategies, motion planning, ball shooting and playing goal. Areas of interest in AI are inter-robot cooperation and competition, and architectures for dynamic domains.
PBMin
A Neural Network Pole-Balancing System that Learns and Operates in Real Time University of Minnesota
Team: Dean Hougen, John Fischer, and Deva Johnam
Pole-balancing is the task of keeping a rigid pole, hinged to a cart, in a roughly vertical orientation by applying a preset force f to either end of the cart at each time step. This task constitutes a problem, as the high center of gravity of the pole produces an inherently unstable system. The pole-balancing problem provides the basis for a difficult control- learning problem in which the controlling system must devise its own solution based on nothing more than the values of a few state variables and a failure signal. To solve this learning control problem, we have developed PBMin, a self-contained, autonomous, minirobot pole-balancer. PBMin learns, from completely random control to successful pole- balancing in a remarkably small number of trials. The PBMin learning system is based on the principles of the self- organizing neural network with eligibility traces (SONNET). SONNET is an unsupervised learning system that is ideal for learning to control many physical, chemical, and biological systems, including the cart-pole system of the pole- balancing problem.
RHINO: Walk Your Robot.
University of Bonn, Germany
Team members: Sebastian Thrun, J.Buhmann, A. Cremers, W.Burgard, D.Fox, T. Hofmann, F.Schneider, J. Strikos B.Trouvain
Rhino is a RWI B-21 mobile robot platform, equipped with 24 sonar sensors and a dual camera system. In the AAAI robot exhibition, we will show Rhino’s abilities to follow people. Rhino employs a expectation-maximization approach for learning to recognize a person. It used fast visual tracking and servoing routines for approaching and following. We will demonstrate real-time learning and following for arbitrary conference attendees.
University of Maryland
Team: Jim Hendler
Exhibit 1: Behavior-Based Robotics: Vacuuming
The robot used in our current research is an IS-Robotics R-2E robot. This robot is a small, wheeled, relatively cheap behavior-based autonomous robot, which is programmed using a behavior language originally developed by Rod Brooks. The behavior code is automatically translated into a set of augmented finite state automata (AFSM) hooked together in a subsumption-based manner. These AFSMs are then compiled into 6811 code, and downloaded to the robot. Four 6811s are used to provide control, with a master processor controlling three others, used for various sensing and effecting. The robot we use has a 2-DOF gripper, eight infrared sensors, each of which can return a value which estimates distance to an object (accuracy approximately 1 ft., with 5 foot max), and 8 bump sensors which return either a force or position reading.
To date, we have implemented a set of behaviors on the robot for vacuuming in our laboratory. It carries a small hand vacuum cleaner in its gripper and attempts to vacuum a surface in our laboratory—- the robot works on a platform which has a rectangular surface and borders allowing the robot’s infrared sensors to detect the end of the platform. Arbitrary obstacles on the platform can’t be effectively avoided due to the robot’s very limited sensing capabilities. Therefore, we limit the shapes and orientations of obstacles so that the robot can avoid them while still being able to clean the floor around them. To differentiate between obstacles and the platform border, which both appear simply as objects to the two front infrared sensors of the robot, we attempt to use what little dead-reckoning is available to keep track of the distance moved in the current lane. Whenever the infrared sensors pick up an object, the robot can tell if this is too close to be the opposing border or too far to be an obstacle.
A border tracking behavior is used to go around obstacles, with corners counted to allow vacuuming to continue. By the time of AAAI we expect the robot to be able to cope with relatively complex obstacles while maintaining a decent course. The robot will carry a dustbuster and try to get good area coverage while avoiding obstacles.
Exhibit 2: Frictionless Motion
We are beginning an exploration of frictionless motion using a unique robot called the Airborne Imaging Robotic System (AIRS). Current plans for AIRS include development of mathematical models for frictionless motion planning. Models of motion planning have typically either assumed totally controlled, point-based motion (perhaps in a frictionless domain) or have had to be adopted for control parameters on acceleration, slippage, etc. Neither model is appropriate for the frictionless 2D motion of a complex vehicle such as AIRS, which is controlled by three air thrusters. We propose to examine vector-field-based motion planning where a non-holonomic robot is operating in a friction-free manner.
Realization of mathematical models: We will be able to test these models on the AIRS vehicle, thus exploring how they transition to real control.
Extension of a hybrid behavior- and control-based model to frictionless motion control. The limitations of current mathematical approaches to frictionless motion include assumption of complete knowledge, perfect sensors, etc. Using the hybrid model we will be able to handle AIRS-motion problems with incomplete and uncertain knowledge, with moving obstacles, etc.